Blokkeer donderdagavond 18 februari 2021 alvast in je agenda. Als alles goed verloopt, landt NASA's nieuwe Marsrover dan op de rode planeet. Het nieuwe wagentje heeft de afmetingen van een kleine auto en heet Perseverance, ofwel 'volharding' en wordt eind deze maand gelanceerd. De rover lijkt zoveel op Curiosity dat het ook wel als zijn tweelingbroer wordt aangeduid. Daarmee doe je Perseverance echter tekort; want het nieuwe model is uitgerust met een berg aan technische verbeteringen en nieuwe instrumenten.
Juist vanwege die gelijkenissen blikken we eerst even terug op Curiosity. Die rover kwam acht jaar geleden aan op Mars en kreeg een ruim twee jaar durende missie mee. Het voornaamste doel was om te kijken of er leven mogelijk is geweest op Mars. Dat deed Curiosity door op zoek te gaan naar chemische indicatoren en sporen in de bodem. Ook onderzocht de rover het klimaat en de geologie van de planeet, en werd de zoektocht naar water vervolgd.
Curiosity slaagde glansrijk in zijn missies. Minder dan twee maanden na zijn landing trof de rover een droge rivierbedding aan, die wees op de aanwezigheid van water in het verleden. Eind 2014 ontdekte Curiosity organische moleculen met daarin de bouwstenen voor leven; het bewijs dat er in een ver verleden leven mogelijk is geweest op Mars.
Gedurende de officiële missie legde Curiosity ongeveer 9km af en bereikte hij probleemloos Mount Sharp, zijn eindbestemming. Curiosity wist echter van geen ophouden; de Marsrover bleef nieuwsgierig en heeft inmiddels zo'n 23km afgelegd. De wetenschappelijke experimenten gingen door, Curiosity vond onder andere sporen van zuurrijk water en in de afgelopen jaren heeft de rover met zijn vele camera's het Marslandschap scherper dan ooit in beeld gebracht. Eerder dit jaar resulteerde dat in het grootste Marspanorama tot nu toe, bestaande uit 1,8 miljard pixels.
De NASA heeft dus nog een actieve Marsrover op de rode planeet, maar het Jet Propulsion Laboratory van de Amerikaanse ruimtevaartorganisatie heeft in de afgelopen jaren hard gewerkt aan de opvolger, die nu klaar staat om gelanceerd te worden.
Nieuwe instrumenten en experimenten
Perseverance ziet er bekend uit, maar heeft veel nieuws te bieden. Zo krijgen de navigatiecamera's een upgrade van 1 naar 20 megapixel en zijn in de mast camera's met zoomobjectieven verwerkt. Ook de wetenschappelijke instrumenten om gesteenten te onderzoeken zijn vernieuwd of geüpgraded en Perseverance heeft nieuwe experimenten aan boord; waaronder een zuurstoffabriekje en een kleine helikopter.
Misschien wel de belangrijkste verandering is de aanpassing van het navigatiesysteem voor de autonome landing, waardoor Perseverance veel nauwkeuriger voet aan de grond kan zetten op de rode planeet. Dat maakt het verkennen van een totaal ander gebied mogelijk.
Perseverance krijgt een minimaal twee jaar durende missie. De belangrijkste taken zijn het verder onderzoek doen naar sporen van leven en het verzamelen van monsters. Ook Curiosity boorde in het oppervlak in zijn zoektocht naar de bouwstenen van leven, maar het grote verschil is dat de nieuwe Marsrover monsters gaat opslaan in buisjes, die later teruggezonden moeten worden naar de aarde. Dat zal gebeuren met toekomstige Marsmissies, die nog in de conceptfase verkeren. Voor de huidige Mars 2020-missie heeft de NASA vier hoofddoelen opgesteld:
Bepalen of er ooit leven heeft bestaan op Mars - Eerdere Marsrovers hebben aanwijzingen gevonden dat er bouwstenen van leven aanwezig zijn op de rode planeet. Perseverance is de eerste rover die daadwerkelijk op zoek gaat naar tekenen van leven die bijvoorbeeld als fossiel bewaard zijn gebleven in gesteenten.
Het in kaart brengen van het klimaat op Mars - Perseverance gaat onderzoeken hoe het klimaat op Mars in het verleden is geweest en zoekt naar bewijs van omstandigheden die in het verleden microbieel leven mogelijk hebben gemaakt.
De geologie van Mars karakteriseren - Door gesteenten te bestuderen moet Perseverance meer onthullen over de geologische processen die door de tijd heen hebben plaatsgevonden op Mars. De rover gaat in gesteenten op zoek naar het bewijs van rotsen die zich in water hebben gevormd en naar sporen van organische stoffen.
Menselijke verkenning van Mars voorbereiden - Tot slot moet Perseverance verdere voorbereidingen treffen voor toekomstige bemande missies naar Mars. De rover moet demonstreren hoe natuurlijke bronnen op Mars aangewend kunnen worden voor levensondersteuning en brandstof. Ook zal Perseverance onderzoek doen naar de intensiteit van uv-straling op de rode planeet.
Nieuwe rover, bekend ontwerp
NASA's nieuwe Marsrover lijkt veel op Curiosity; het uiterlijk en de afmetingen zijn vrijwel gelijk. De zeswielige rover is opnieuw van een kenmerkende mastcamera voorzien en aan de voorkant zit een robotarm met een boor en tal van instrumenten.
Dat de NASA het ontwerp van Perseverance baseert op Curiosity, lijkt wellicht ingegeven door het succes van laatstgenoemde rover, toch is dat niet de enige reden. De plannen voor de nieuwe Marsrover werden al in december 2012 gepresenteerd, terwijl Curiosity slechts enkele maanden eerder op de rode planeet was geland. De NASA had destijds te maken met flinke bezuinigingen en moest voor de nieuwe missie dus op zoek naar een goedkope oplossing. Voor de nieuwe rover zijn diverse reserveonderdelen gebruikt die al voor Curiosity gemaakt waren.
Omdat werd gekozen voor een bestaand en beproefd ontwerp dat de risicovolle Marslanding succesvol had doorstaan, hoefde de NASA relatief weinig tijd en geld in verder onderzoek te steken en zijn de risico's voor de nieuwe missie beperkt.
In zijn lange loopbaan heeft Curiosity wel wat probleempjes gehad. Zo raakten de wielen sneller beschadigd dan verwacht. Uiteindelijk bleek de rover echter ook met wat gaten en scheuren in de wielen zijn weg te kunnen vervolgen. Het Marswagentje kreeg ook een aantal keer te maken met hardware- en softwareproblemen, maar door over te schakelen naar de reserveboordcomputer en een reset uit te voeren, werd dat opgelost.
Verbeteringen en aandrijving
De lengte-, breedte- en hoogtematen van Perseverance zijn 3 x 2,7 x 2,2m. De Marsrover weegt zo'n 1025kg en daarmee is het nieuwe model 125kg zwaarder dan zijn voorganger. Vanwege dat extra gewicht en de eerdere ervaringen met Curiosity, zijn de wielen steviger uitgevoerd. De zes wielen van Perseverance zijn iets smaller, maar hebben een grotere diameter, zijn gemaakt van dikker aluminium en hebben meer profiel. De wielen hebben spaken van titanium en zijn ieder voorzien van een eigen elektromotor. De twee wielen aan de achter- en voorkant hebben ieder ook een stuurmotor, zodat de rover rondjes om zijn as kan draaien.
De wielen van Perseverance hebben een diameter van 52,6cm, iets groter dan de Curiosity-wielen met een diameter van 50,8cm.
De maximale snelheid van Perseverance is 4,2cm/s. Dat komt overeen met 150 meter per uur. In de praktijk zal de snelheid uitkomen op zo'n 100 tot 120 meter per uur. Die lage snelheid is vergelijkbaar met het slakkengangetje waarmee Curiosity over de rode planeet beweegt. Door het lage tempo is er weinig energie nodig voor de voortbeweging en is er voldoende tijd om de omgeving te bestuderen en gevaar op de weg te signaleren.
Perseverance is voorzien van een rtg, ofwel een radio-isotopengenerator. Die bevat 4,8kg radioactief plutonium en de warmte die bij het verval daarvan vrijkomt, wordt omgezet in elektriciteit. De nieuwe Marsrover gebruikt exact dezelfde generator als Curiosity; het gaat om een exemplaar dat als back-up voor die rover was gemaakt. De krachtbron gaat volgens de specificaties op zijn minst veertien jaar mee. De rtg levert aanvankelijk 110W, al neemt dat door het radioactieve verval per jaar met een paar procent af. Perseverance is ook voorzien van twee li-ionaccu's waarin energie wordt opgeslagen voor de momenten dat de rover een hogere piekstroom nodig heeft dan de generator kan leveren.
Eerdere Marsrovers, zoals Spirit en Opportunity, waren voorzien van zonnecellen, maar een nucleaire batterij biedt meer zekerheid. De beschikbare zonne-energie is afhankelijk van de zonkracht en dus de seizoenen. Ook kunnen stofstormen problemen veroorzaken. Zo verloor de NASA het contact met Opportunity nadat de panelen bedekt raakten door een laag stof.
De boordcomputer van Perseverance is deels gelijk aan die van Curiosity. Het zogenaamde Rover Compute Element is dubbel uitgevoerd; er zijn twee identieke RCE's aanwezig, waarvan één dient als back-up. In ieder RCE zit een RAD750-processor, gemaakt door BAE Systems. Die 150nm-cpu is gebaseerd op de PowerPC 750-architectuur en draait op 200MHz.
De gebruikte processor is wat rekenkracht betreft vergelijkbaar met de cpu die in Apples eerste iMac uit 1998 zat. Ook dat ging om een PowerPC 750-ontwerp. Het RAD-exemplaar in de Marsrover is echter bestand tegen enige radioactieve straling en heeft zijn werking uitgebreid bewezen. De chip is sinds 2001 in gebruik. Perseverance beschikt verder over 256MB ram en 2GB flashgeheugen; ook dat is gelijk aan de boordcomputer van Curiosity.
De NASA zegt dat Perseverance beter in staat is om zelfstandig te opereren. De nieuwe Marsrover kan daardoor afstanden tot 200m autonoom afleggen zonder dat tussenkomst van techneuten op aarde noodzakelijk is. De rover gebruikt daarvoor navigatiecamera's en kunstmatige intelligentie om de omgeving te herkennen en zo obstakels te vermijden. Dat gebeurt ook bij de landing. De rover is daarvoor uitgerust met een nieuw Vision Compute Element, dat is voorzien van een fpga van Xilinx. Het gaat om de Virtex-5QV, die ook enige radioactieve straling kan weerstaan. De programmeerbare chip wordt ingezet bij het versnellen van taken als beeldherkenning, en het vergelijken en filteren van beeldmateriaal.
Perseverance is voorzien van een Vision Compute Element met Xilinx-fpga voor ai-toepassingen
Landing in de Jezero-krater
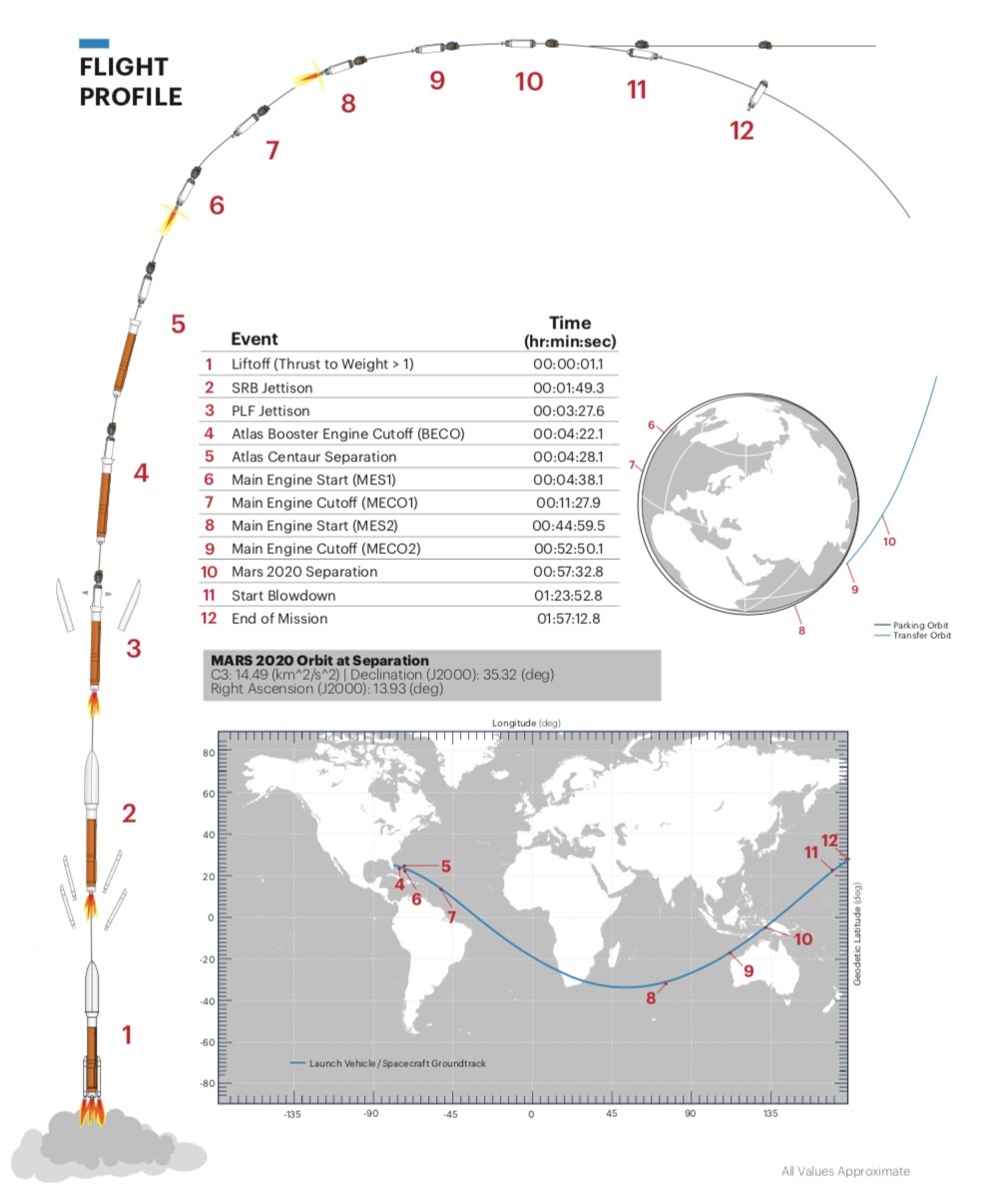
Perseverance wordt de ruimte ingeschoten met een Atlas V 541-raket van de United Launch Alliance. Dat is de raket die Curiosity succesvol een enkele reis naar Mars bezorgde. De lancering vindt plaats vanaf de Amerikaanse vliegbasis Cape Canaveral en vooralsnog is die gepland voor 30 juli 13:50 uur Nederlandse tijd. Er is dan een lanceervenster van twee uur beschikbaar.
Vluchtprofiel van Mars 2020-lancering
Update, dinsdag 30 juli: de lancering is succesvol en volgens planning verlopen.
Als omstandigheden de lancering niet toelaten, is beperkt uitstel mogelijk. De lancering moet ergens tussen 30 juli en 15 augustus plaatsvinden. Volgens de oorspronkelijke planning was het lanceervenster in de periode van 17 juli tot 11 augustus gezet, maar een aantal kleine complicaties hebben tot uitstel geleid. Het lanceervenster kan niet eindeloos worden opgeschoven; tijdens de gekozen periode is de afstand tussen de aarde en Mars optimaal voor een lancering en die situatie komt slechts eens in de 26 maanden voor.
Perseverance is eerder deze maand al gekoppeld aan de descent stage en in een beschermende capsule gestopt. Die is op zijn beurt gemonteerd in de neuskegel van de draagraket. Als de lancering in de komende weken lukt, komt de Marsrover op 18 februari 2021 rond 21:40 uur Nederlandse tijd aan bij de rode planeet.
Door de afstand tussen Mars en aarde zit er een vertraging van 4 tot 24 minuten in alle communicatie met Perseverance, die via satellieten verloopt. Vanwege die vertraging is het niet mogelijk om handmatig een landing uit te voeren of om correcties door te geven. Perseverance moet zelfstandig voet aan de grond zetten en dat gebeurt met het systeem dat ook met succes voor Curiosity is gebruikt.
De EDL-procedure, wat staat voor entry, descent en landing, duurt in totaal zeven minuten. De NASA noemt dat ook wel de zeven horrorminuten, omdat er tijdens deze fase geen enkele controle is over de missie. Er zit niets anders op dan afwachten en hopen dat alle voorgeprogrammeerde systemen goed werken.
De capsule waar Perseverance in zit, bereikt de atmosfeer met een snelheid van zo'n 21.000km/u. Door de vorm en de massa van de capsule neemt die snelheid tijdens de daling snel af en op een hoogte van zo'n 11km, als de snelheid is gezakt naar zo'n 3000km/u, klapt er een grote parachute uit om de capsule verder af te remmen. Die 88kg wegende parachute is 21,5m breed en gemaakt van nylon-, Technora- en kevlarvezels.
Op een hoogte van zo'n 8km wordt het hitteschild losgelaten en wordt de radar van Perseverance geactiveerd om te bepalen hoever er nog te gaan is. Als een hoogte van 1,6km is bereikt, wordt de landing stage waar Perseverance aan vastzit, losgekoppeld van de capsule en maakt deze een korte vrije val. Vervolgens worden de acht raketboosters van de landing stage ingeschakeld om verder af te remmen, en de vallende capsule en parachute te ontwijken.
De boosters remmen de landing stage af tot een snelheid van 2,7km/u en op een hoogte van 20m wordt de sky crane-manoeuvre uitgevoerd. Perseverance zit met drie nylonkabels vast aan het landingsgedeelte en wordt zachtjes naar beneden getakeld. Als Perseverance voet aan de grond heeft gezet, worden de kabels losgekoppeld en maakt de landing stage een ontwijkende manoeuvre.
Bovenstaande procedure werd succesvol met Curiosity uitgevoerd en in de basis zal Perseverance hetzelfde doen, maar de NASA heeft het landingssysteem diverse upgrades gegeven, wat een veel nauwkeurigere landing mogelijk moet maken. Bij vorige landingen op de rode planeet was er een vrij grote foutmarge. Exact op de juiste positie landen is moeilijk.
Bij de landing van Curiosity was het landingsgebied een ellips van 25x20km. De exacte landingsplek was afhankelijk van bijvoorbeeld de wind tijdens het afdalen aan de parachute. Een van de nieuwe landingstechnieken is Range Trigger; daarmee kan het landingsgebied voor Perseverance verkleind worden tot een ellips met een diameter van 10km. Dat werkt door nauwkeuriger te bepalen wanneer de parachute uitgeklapt moet worden. Bij eerdere missies gebeurde dat zo snel mogelijk; nu zal dat gebaseerd worden op de positie van de capsule ten opzichte van de gewenste landingsplek.
Daarnaast is Perseverance uitgerust met Terrain-Relative Navigation. Dat is een systeem voor beeldherkenning waarmee de rover tijdens de afdaling met camera's kijkt naar het landschap onder zich. Bestaande sondes, zoals NASA's Mars Reconnaissance Orbiter, hebben een kaart van het landingsgebied gemaakt en daarop zijn gevaarlijke plekken aangegeven. Die kaart is opgeslagen in de boordcomputer van Perseverance en tijdens de landing vergelijkt de rover het gebied onder zich met de opgeslagen kaart. Als blijkt dat de rover op een risicovol gebied afstevent, stuurt de landing stage automatisch bij.
Dit navigatiesysteem heeft het aantal potentiële landingsplekken voor Marsrovers enorm vergroot. Nu het mogelijk is om obstakels te ontwijken, kan er geland worden in omgevingen met ruw terrein en bijzondere rotsformaties, waar vermoedelijk veel interessante gegevens uit zijn te halen. Bij voorgaande Marslandingen moest 99 procent van het landingsgebied vrij zijn van gevaarlijke rotsen en hellingen. Eerdere Marsrovers konden dus alleen landen in relatief saaie omgevingen.
Volgens de NASA maakt Terrain-Relative Navigation het mogelijk om met een nauwkeurigheid van 60m te landen in het gekozen gebied. Bij eerdere Marslandingen zonder die techniek was die nauwkeurigheid zo'n 2 tot 3km. Marsrover Curiosity kwam bijvoorbeeld terecht op een afstand van 2,4km van het middelpunt van het aangewezen landingsgebied.
Landing in beeld en geluid
De beschreven landingsprocedure is met Curiosity succesvol uitgevoerd, maar beelden zijn daar nauwelijks van. Wat zich precies afspeelt in de zeven horrorminuten, is tot dusver alleen in animaties te zien. Perseverance brengt daar verandering in; de nieuwe rover en de landing stage zijn uitgerust met zeven camera's die omhoog- en omlaagkijken, om zo de parachute en de landing in beeld te brengen. Ook zal er geluid opgenomen worden.
Die camera's zijn er om ingenieurs inzicht te geven in het landingsproces, maar ook om de spectaculaire landing aan het publiek te kunnen tonen. De camera's leggen video vast in kleur en zijn geen kritieke onderdelen voor de missie. De NASA gebruikt naar eigen zeggen voor deze camera's 'gemakkelijk verkrijgbare commerciële hardware'. Het gaat dus niet om apparatuur die speciaal voor ruimtemissies is gemaakt. Live meekijken zal door de vertraging niet mogelijk zijn, maar als Perseverance de landing overleeft, worden de beelden daarna naar de aarde verzonden.
De landing van Curiosity is vastgelegd met één camera aan de onderkant van de rover. YouTuber Ross Melville combineerde de beelden met een animatie van de landingsprocedure. De extra camera's moeten bij de nieuwe missie de hele procedure zichtbaar maken.
Bestemming: Jezero-krater
Dankzij de nieuwe landingstechnieken kon de NASA met Perseverance kiezen uit veel meer landingsgebieden. Er zijn meer dan zestig gebieden overwogen en uiteindelijk is na vijf jaar onderzoek de keuze gevallen op de Jezero-krater. Die 45km brede krater was vermoedelijk miljoenen jaren geleden een groot meer, met daarnaast een rivierdelta. De bedoeling is dat Perseverance vlakbij de delta neerkomt, om vervolgens daar en aan de rand van de krater onderzoek te doen.
Volgens wetenschappers zijn in het gebied veel interessante gesteenten te vinden, waaronder kleien en carbonaten die een hoge potentie hebben om sporen van leven uit het verleden in microscopische fossielvorm te bevatten. De kans op een veilige landing is door de toepassing van Terrain-Relative Navigation 99 procent, zegt de NASA. Zonder die techniek zou de kans op een succesvolle landing in datzelfde gebied volgens de ruimtevaartorganisatie uitkomen om zo'n 80 tot 85 procent.
Helikopter aan boord
Perseverance bevat tal van instrumenten om experimenten uit te voeren op Mars, maar er gaat ook een kleine helikopter mee. Het helikoptertje heeft de naam Ingenuity gekregen, ofwel 'vindingrijkheid'. Het is onder de buik van de rover gemonteerd en zal op de rode planeet losgekoppeld worden. De bedoeling is dat Ingenuity vervolgens een aantal zelfstandige vluchten uitvoert. Die vluchten zelf zijn het voornaamste doel; het is de eerste keer dat er gepoogd wordt met een helikopter te vliegen op Mars. Door de ijle lucht is dat een uitdaging; de dichtheid van de atmosfeer op Mars bedraagt ongeveer één procent van die op aarde. Daarom draaien de rotors ongeveer acht keer zo snel als die van aardse helikopters.
Ongeveer 2,5 maand na de landing van Perseverance vinden de testvluchten van Ingenuity plaats. Dat gebeurt tijdens een periode van dertig Marsdagen. Bij de eerste vlucht is het doel enkel opstijgen en twintig à dertig seconden in de lucht blijven hangen. Als dat lukt, worden daarna steeds langere vluchten uitgevoerd, waarbij Ingenuity meer afstand zal afleggen en grotere hoogtes zal bereiken. Die afstanden blijven wel beperkt; volgens de planning gaat het om een verplaatsing per vlucht van maximaal 300m en een hoogte van maximaal 5m. De vluchten blijven beperkt tot een vluchtduur van maximaal 90 seconden.
Technische specificaties
Ingenuity weegt 1,8kg en heeft een spanwijdte van 1,2m. De helikopter is uitgevoerd met dubbele rotors, die in tegengestelde richting draaien met maximaal 2400 omwentelingen per minuut. De rotors zijn gemaakt van koolstofvezel, net als de poten. Het rechthoekige kastje onder de rotors heeft afmetingen van 20x16x14cm en huisvest de boordcomputer, li-ionacccu, sensoren en twee navigatiecamera's. Ook zijn verwarmingselementen aanwezig, zodat Ingenuity de koude Marsnachten kan overleven. In de Jezero-krater waar Ingenuity zijn vluchten zal uitvoeren, kan de temperatuur tot 90ºC onder het vriespunt duiken.
Aan de bovenkant zitten een zonnepaneel en radioantennes voor communicatie met Perseverance. Volgens berekeningen van de NASA zal de helikopter tijdens het vliegen gemiddeld 350W verbruiken. Het zonnepaneel en de accu moeten goed zijn voor één vlucht van maximaal 90 seconden per Marsdag.
De Marshelikopter kan alleen autonoom vliegen, op routes die vooraf vanaf de Marsrover naar de helikopter worden verzonden. Het is niet mogelijk om tussentijds bij te sturen of de helikopter direct te bedienen. Alle data die Ingenuity tijdens zijn testvluchten verzamelt, wordt teruggestuurd naar Perseverance. Vervolgens kan de data naar de aarde verzonden worden.
Een testmodel dat vrijwel gelijk is aan Ingenuity, heeft al succesvolle testvluchten uitgevoerd op aarde. Daarbij werden de omstandigheden van de Marsatmosfeer nagebootst. Dat gebeurde in de JPL Space Simulator, een cilinder met een diagonaal van 7,62m, die vacuüm werd gezogen. Ook werden de stikstof en zuurstof vervangen door koolstofdioxide, het belangrijkste bestanddeel van de atmosfeer van Mars.
Daarnaast moest twee derde van de zwaartekracht van de aarde weggenomen worden om vliegen op Mars te simuleren. Dat is gedaan met een zwaartekrachtontlastingssysteem, een gemotoriseerde draagriem die aan de bovenkant van de helikopter werd bevestigd. Dat systeem leverde trekkracht om de lagere zwaartekracht na te bootsen. De succesvolle experimenten zijn vastgelegd op video.
De NASA benadrukt dat de helikoptermissie een experiment is. Ingenuity krijgt geen uitgebreid takenpakket mee, maar moet duidelijk maken of vliegen met een helikopter op Mars lukt. Als dat succesvol blijkt, gaat de ruimtevaartorganisatie overwegen om in de toekomst uitgebreidere helikopters naar Mars te sturen. Die kunnen dan assisteren bij missies, bijvoorbeeld bij het verkennen van de route.
Koppelsysteem
In april is Ingenuity aan de onderkant van Perseverance bevestigd. De helikopter wordt nog voorzien van een afdekkap voor de nodige bescherming tijdens de landing. In juni is het koppelsysteem waarmee Ingenuity wordt losgelaten, in de praktijk getest. Voordat de helikopter op de planeet wordt gedropt, klappen eerst de poten uit, zodat de valafstand flink wordt verkleind. In onderstaande video is dat te zien.
Flinke camera-upgrades
Perseverance is net als Curiosity uitgerust met tal van camera's. Een deel daarvan wordt gebruikt voor navigatie, een ander deel heeft speciale eigenschappen en behoort toe aan de verschillende meetinstrumenten. De camerasystemen van Perseverance en Curiosity vertonen gelijkenissen, maar er zijn ook duidelijke verschillen waardoor de nieuwe Marsrover de planeet veel gedetailleerder en kleurrijker in beeld kan brengen.
In totaal beschikt Perseverance over 23 camera's. Dat zijn er een stuk meer dan de 17 camera's van Curiosity, maar dat komt vooral door de toevoeging van de camera's die de afdaling en landing zullen vastleggen. Het aantal Engineering- en Science-camera's is gelijk; de specificaties zijn dat echter niet.
Van 1 naar 20 megapixel en van zwart-wit naar kleur
De Engineering-camera's van Perseverance krijgen een flinke upgrade. Dit zijn camera's als de Navcams en Hazcams, die gebruikt worden voor navigatie en inspectie van de rover zelf. Curiosity was nog voorzien van 1-megapixelcamera's met zwart-witsensor voor deze toepassingen. Diezelfde camera's werden ook al gebruikt op Spirit en Opportunity, de Marsrovers die in 2004 aan hun missie begonnen.
Perseverance krijgt kleurencamera's met een grote 20-megapixelsensor. Ook krijgen de camera's lenzen met een grotere beeldhoek, zodat ze meer van de omgeving in beeld kunnen brengen. Daardoor kan de nieuwe rover ook sneller navigeren; Curiosity moet vaak diverse plaatjes schieten en aan elkaar plakken om de omgeving volledig in beeld te brengen. Perseverance hoeft veel minder shots te maken en kan dat dus sneller doen. De nieuwe camera's moeten tegelijk de bewegingsonscherpte verminderen, waardoor de rover ook tijdens het rijden scherpe foto's kan maken.
De NASA gebruikt voor alle Engineering-camera's dezelfde cmos-sensor van het fullframeformaat. Het gaat om een sensor van ON Semiconductor met een resolutie van 5120x3840 pixels, een pixelgrootte van 6,4µm en een globale sluiter. De sensors zijn in modules gestopt en gecombineerd met objectieven met een vaste brandpuntsafstand en een vast diafragma van f/12. De modules hebben zonder lens afmetingen van 75x85x55mm en wegen per stuk zo'n 425g.
Boven op de mast van Perseverance zitten twee Navcams. Die hebben objectieven met een horizontale beeldhoek van 96º. Vanaf een hoogte van zo'n 2m leggen ze het landschap vast. Deze camera's kunnen ook 360º-panorama's maken en de bovenkant van de Marsrover inspecteren.
Aan de voor- en achterkant van de rover zitten de Hazcams. Die hebben een horizontale beeldhoek van 136º en zijn bedoeld om de directe omgeving nauwkeurig vast te leggen en zo eventueel gevaar op de route te signaleren. De camera's zijn vooral bedoeld om delen van de omgeving vast te leggen die de Navcams niet kunnen waarnemen.
De Navcams en Hazcams zijn in paren van twee gemonteerd, zodat ze stereobeelden kunnen maken en diepte kunnen zien. Het beeldmateriaal wordt gevoerd aan het navigatiesysteem en op basis daarvan kan Perseverance autonoom zijn weg bepalen.
Aan de binnenkant van de rover zit de Cachecam. Die heeft dezelfde sensor als de andere Engineering-camera's, maar is voorzien van een 30mm f/8-objectief. Deze camera maakt close-upfoto's van monsters die Perseverance verzamelt.
Mastcam-Z met zoom
Perseverance is net als Curiosity uitgerust met een kenmerkende Remote Sensing Mast, waarop diverse instrumenten zijn gemonteerd. De twee rechthoekige 'ogen' op de kop zijn de stereocamera's van de Mastcam-Z. Ook Curiosity heeft zo'n Mastcam, maar dan zonder Z, wat staat voor zoom. De NASA had oorspronkelijk het plan om Curiosity van zoomlenzen te voorzien, maar het lukte niet om die binnen de gestelde tijd klein genoeg te maken. Inmiddels is dat wel gelukt en daar profiteert Perseverance van.
De Mastcam-Z is op de lenzen na grotendeels vergelijkbaar met de Mastcam van Curiosity. De twee camera's gebruiken dezelfde OnSemi KAI-2020CM-sensors. Dat zijn ccd's met een resolutie van 1600x1200 pixels en afmetingen van ongeveer 12x9mm. De pixelgrootte is 7,4µm.
In de Mastcam-Z zitten twee zoomobjectieven met brandpuntsafstanden van 28-100mm. Omgerekend naar 35mm-equivalent komt dat ongeveer overeen met 85-300mm. De horizontale beeldhoek is 23º in de uitgezoomde stand en 6º bij maximaal inzoomen. Wetenschappers die aan de Mastcam-Z werkten, demonstreren het zoombereik in een blog. Curiosity heeft geen zoomobjectieven, maar wel een vergelijkbaar bereik. De Mastcam van de oude rover heeft aan de ene kant een 34mm-objectief en aan de andere kant een 100mm-exemplaar.
De 2-megapixelresolutie van de Kodak-sensor klinkt weinig indrukwekkend. Toch is het de Mastcam waarmee Curiosity in de afgelopen jaren indrukwekkende panoramafoto's heeft gemaakt. Dat kan door talloze foto's te maken en die achteraf te combineren tot één geheel. Dat levert gigantische en zeer gedetailleerde foto's op. In maart leverde Curiosity zijn grootste Marspanorama tot nu toe af, bestaande uit 1,8 miljard pixels.
Perseverance kan op dezelfde manier panoramafoto's maken, maar is een stuk flexibeler door zijn mogelijkheid om te zoomen. Ook kan Perseverance met zijn Mastcam-Z eenvoudiger stereofoto's maken, doordat de brandpuntsafstand van beide objectieven gelijk is te zetten. Curiosity maakt ook al stereofoto's met zijn Mastcam, maar de 100mm-lens moet veel meer foto's maken om de beeldhoek gelijk te krijgen aan die van de 34mm-lens.
De Mastcam-Z is niet gemaakt om alleen vakantiekiekjes te schieten; het is ook een belangrijk instrument voor wetenschappers. Met de zoomlenzen kunnen objecten op afstand beoordeeld worden. De camera's kunnen kenmerken in het landschap ter grootte van 1mm in de nabije omgeving van de rover waarnemen en op een afstand van 100m zijn kenmerken van 3 à 4cm nog te onderscheiden.
Verder is de Mastcam-Z uitgerust met elf verschillende smalbandfilters, waarmee de waarneming van de camera's kan worden aangepast. De ccd's zijn in staat om licht met golflengten van 400 tot 1000nm vast te leggen en de filters kunnen dat bereik beperken. Door foto's te maken bij verschillende golflengten, zijn details in de samenstelling van bepaalde mineralen te onderscheiden.
De relatief lage resolutie stelt de Mastcam-Z ook in staat om snel veel foto's te maken. De camera is voorzien van 256MB sdram als cache en 8GB flashgeheugen voor de opslag van beelden. Zowel in de camerakop als in de digital box waarop deze is aangesloten, zit een fpga die gebruikt wordt voor het aansturen van de zoomfunctie en analyse van de beelden.
SuperCam met rode en groene laser
Boven op de mast van Perseverance zit ook de SuperCam. Dat is een telescoop met lasers, die gebruikt worden om de atomaire en moleculaire samenstelling van gesteenten op Mars te onderzoeken. Curiosity heeft met zijn ChemCam een vergelijkbaar instrument. De SuperCam is daar een upgrade van, met een extra groene laser, die nieuwe mogelijkheden toevoegt.
De SuperCam bestaat uit vier subsystemen. Die maken Laser-Induced Breakdown Spectroscopy, ramanspectroscopie, infraroodspectroscopie en Remote Micro-Imaging mogelijk. LIBS gebruikt een 1064nm-laser om doelen binnen een bereik van 7m te onderzoeken. Diezelfde rode laser zit ook op Curiosity en wordt gebruikt om de samenstelling van gesteenten en bodemmonsters te onderzoeken. Ook kan de laser gebruikt worden om stof van oppervlakken op afstand te verwijderen, om er zo beter zicht op te krijgen. Curiosity heeft dit al gedemonstreerd.
Ramanspectroscopie is een nieuwe toevoeging aan Perseverance. Met deze techniek kunnen vibraties en rotaties op moleculair niveau bekeken worden. De SuperCam gebruikt hiervoor de groene 532nm-laser, die werkt tot afstanden van 12m. Infraroodspectroscopie is een vergelijkbare techniek, die gebruikt kan worden om objecten op grotere afstanden te bestuderen.
De lasers zijn in de SuperCam gecombineerd met een telescoop met een diameter van 110mm en een Remote Micro-Imager. Dat is de camera die de waarnemingen voor de SuperCam-instrumenten verricht. Deze RMI gebruikt een CMV4000-cmos-sensor van Cmosis met een 4-megapixelresolutie. Bij de ChemCam was dat nog een 1-megapixel-ccd. Ook is de SuperCam voorzien van een elektretmicrofoon, die de schokgolven van de lasers kan waarnemen tot een afstand van 4m. Met de informatie die dat oplevert, kan de hardheid van gesteenten bepaald worden. De microfoon gaat ook windgeluid en geluid van de rover zelf opnemen.
SuperCam is net als ChemCam gemaakt door het Franse Thales. Het instrument is ontwikkeld door een samenwerkingsverband van wetenschappers van instituten en organisaties uit de Verenigde Staten, Frankrijk en Spanje.
Monsters verzamelen en terugsturen
Net als Curiosity gaat Perseverance boren in het Marsoppervlak om zo meer te weten te komen over de geschiedenis van de planeet. Er is echter een groot verschil: Curiosity verzamelde en onderzocht monsters in een ingebouwd laboratorium, Perseverance gaat monsters niet alleen onderzoeken, maar ook opslaan in buisjes met het doel die later terug te sturen naar de aarde.
Dat is voorlopig toekomstmuziek. Perseverance heeft niet de capaciteiten om zelf terug te keren of om de buisjes omhoog te schieten. Het is de bedoeling dat er in de komende jaren een nieuwe Marsmissie volgt om de monsters op te halen en terug te brengen. De NASA werkt voor dit Mars Sample Return-project samen met de Europese ruimtevaartorganisatie ESA, die daar eind 2019 budget voor vrijmaakte.
De huidige planning is dat Perseverance dertig buisjes verzamelt die per stuk zo'n 20g aan monsters bevatten. Deze buisjes moeten in 2031 op aarde arriveren. Om dat voor elkaar te krijgen, zijn nog twee extra missies nodig. De eerste stuurt een fetch-rover en klein raketplatform naar Mars, de tweede lanceert een Earth Return Orbiter en plaatst die in een baan om de rode planeet. Vervolgens wordt vanaf het raketplatform op Mars een capsule met de monsters gelanceerd; die komt in een baan om Mars terecht en wordt daar opgepikt door de satelliet. Vervolgens zet die de reis terug naar de aarde in. De Mars Sample Return-missies zitten nog in de voorstelfase en zijn nog niet concreet uitgewerkt.
Voordat er Marsmonsters naar de aarde verzonden worden, is er nog een lange weg te gaan, maar het systeem voor het verzamelen, beoordelen en opslaan van die monsters, is al wel volledig uitgewerkt. Perseverance is voorzien van het Sample Caching System, waaraan zeven jaar is gewerkt.
De 2,1m lange, uitschuifbare robotarm van Peserverance bevat aan het einde een kop met diverse meetinstrumenten en een boor met een diameter van 27mm. Nadat wetenschappers een potentieel interessant doelwit hebben aangewezen, boort Perseverance 5cm diep in het oppervlak en wordt een monster geëxtraheerd.
Uitgeboorde monsters worden opgeslagen in een buisje en vervolgens naar de behuizing van de rover gebracht, waar verdere analyse plaatsvindt. In de rover zit nog een robotarm: de Sample Handling Arm. Die beweegt de monsters langs instrumenten zoals de CacheCam voor analyse en na goedkeuring wordt het buisje hermetisch afgesloten en opgeslagen in de rover.
Het plan is om tijdens de missie buisjes op te slaan en die op een gegeven moment op het Marsoppervlak neer te leggen op strategische locaties, zodat een toekomstige rover ze kan ophalen. Perseverance kan dan zijn weg vervolgen en eventueel terugkeren om meer samples toe te voegen aan de collectie.
Sherloc & Watson speuren naar leven
De robotarm van Perseverance bevat naast de boor verschillende andere instrumenten om de uitgekozen doelwitten nauwkeurig te onderzoeken. Zo zijn er Sherloc & Watson: detectives die op zoek gaan naar sporen van leven. De namen zijn afkortingen; eerstgenoemde staat voor scanning habitable environments with raman and luminescence for organics and chemicals en de tweede voor wide angle topographic sensor for operations and engineering.
Sherloc is een instrument voor ramanspectroscopie met een uv-laser. Hiermee kan de mineralogie van gesteenten bepaald worden en zijn organische verbindingen te detecteren. Sherloc opereert op een klein oppervlak van 7x7mm en kan onder andere de gemaakte boorgaten analyseren om zo snel inzicht te krijgen in het verzamelde monster.
Watson assisteert Sherloc door de context rondom het kleine meetgebied van Sherloc vast te leggen. Nadien kunnen foto's van Watson gecombineerd worden met meetgegevens van Sherloc. Ook kan Watson met zijn groothoeklens selfies maken van Perseverance. De camera is vergelijkbaar met de Mars Hand Lens Imager op Curiosity.
Een ander instrument op de kop is PIXL, waarmee de elementaire samenstelling van gesteenten bestudeerd kan worden door middel van röntgenfluorescentiespectrometrie. Daarbij wordt het doelwit met röntgenstraling beschoten; het monster zendt vervolgens röntgenstraling terug die karakteristiek is voor elementen die in het materiaal zitten. Ook heeft PIXL een close-upcamera waarmee voorwerpen ter grootte van zandkorrels scherp in beeld gebracht kunnen worden.
Weerstation Meda
In de rover is nog een aantal andere wetenschappelijke instrumenten verwerkt. Zo zit aan de bovenkant het weerstation MEDA, ofwel de Mars Environmental Dynamics Analyzer. Dit instrument staat in verbinding met diverse sensoren op de Marsrover die de weersomstandigheden in kaart brengen. Zo meet MEDA onder andere de windsnelheid, temperatuur, luchtvochtigheid en hoeveelheid stof in de lucht. Ook bevat het instrument een SkyCam, die omhoogkijkt om de intensiteit van de zon te meten. De NASA heeft hiervoor een oude back-upcamera van Curiosity uit de kast getrokken. De camera heeft een 1-megapixel-ccd en een 5,6mm f/15-fisheye-objectief.
Zuurstof maken met Moxie
Met het Moxie-instrument wil de NASA een manier demonstreren om zuurstof te produceren uit de koolstofdioxide in de Marsatmosfeer. Die zuurstof zou gebruikt kunnen worden om te overleven en als brandstof. Moxie staat voor Mars oxygen in-situ resource utilization experiment. Als het experiment succesvol is, overweegt de NASA om uitgebreidere missies naar Mars te sturen voor de productie van zuurstof, die dan bij latere missies gebruikt kan worden. De zuurstof zou bijvoorbeeld als brandstof gebruikt kunnen worden voor het terugsturen van Marsmonsters naar de aarde. Het huidige instrument is een schaalmodel ter grootte van 1 procent. Om bruikbare hoeveelheden zuurstof te produceren, is een veel groter apparaat nodig.
Bodemonderzoek met Rimfax
Perseverance heeft ook een bodemradar aan boord. Dat instrument heet Rimfax en die afkorting staat voor radar imager for Mars' subsurface experiment. De radarantenne zit aan de achterkant van de rover en tijdens het rijden zal Perseverance met Rimfax iedere 10cm een meting doen. Om beurten worden radiogolven gestuurd voor een diepe meting en een ondiepe meting. De NASA verwacht dat de radarsignalen tot 10m diep in de bodem zullen reiken, maar misschien lukt het om op sommige plekken nog veel dieper te kijken, als radiogolven dieper in de bodem kunnen penetreren. Het is de eerste keer dat de NASA een bodemradar naar Mars stuurt. De ruimtevaartorganisatie hoopt bijvoorbeeld water of ijs onder het bodemoppervlak te vinden.
Perseverance is niet de eerste Marsrover en zal ook zeker niet de laatste zijn. Ook China is van plan om binnenkort een Marsrover te lanceren. Die missie staat bekend onder de naam Tianwen-1 en China werkt daar sinds 2009 aan. Het gaat om China's eerste Marsrover, die 240kg weegt en een stuk kleiner is dan Perseverance. De Chinese ruimtevaartorganisatie CNSA geeft nog geen duidelijkheid over de exacte lanceerdatum, maar die zal ergens in de komende weken moeten vallen, binnen het lanceervenster waaraan ook Perseverance is gebonden.
De Europese ruimtevaartorganisatie ESA had in samenwerking met het Russische Roscosmos ook een Marsrover-lancering gepland voor het lanceervenster dit jaar, maar die ExoMars-missie is door vertragingen opgeschoven naar 2022. De rover voor die missie, genaamd Rosalind Franklin, is al gereed. Dit karretje weegt 310kg en is ook een stuk kleiner dan Perseverance.
De NASA stuurde sinds 1975 diverse landers naar Mars, daaronder ook vier rovers die op de planeet kunnen bewegen. Sojourner was in 1997 de eerste Marsrover die landde op de planeet, als onderdeel van de Pathfinder-lander. Perseverance zal flink zijn best moeten doen om eerdere missies te overtreffen, want de rovers Spirit, Opportunity en Curiosity overtroffen alle verwachtingen en gingen veel langer mee dan gepland.
Omdat Perseverance in veel opzichten een kopie is van Curiosity, is de kans groot dat de nieuwe Marsrover ook lang zal meegaan. Daarvoor zal eerst de lancering moeten plaatsvinden en als die goed verloopt, komt het volgende nagelbijtmoment op 18 februari 2021, als de rover zijn afdaling naar de Jezero-krater inzet. Als Perseverance die 'zeven horrorminuten' veilig doorstaat, kan het nieuwe hoofdstuk in de zoektocht naar leven op Mars beginnen.
Wat een leuk artikel!
Ben erg benieuwd naar de lancering straks!
Daarnaast heb ik het geluk gehad, dat mijn naam (samen met vele anderen) op de rover is ge-etst. Wat dit ook wel een bijzonder gevoel geeft. Wie weet komt deze rover ooit in een soort van museum op Mars, mochten we daar ooit koloniseren.
Top artikel !
Ik had al wat informatie gehaald uit youtube filmpjes en de NASA website, maar dit vat het mooi samen. Ongelofelijk dat er zoveel zelfstandig kan worden uitgevoerd. Moet natuurlijk gezien de afstand, maar toch om dat in software en hardware te kunnen maken, ik neem mijn petje er voor af.
De UHF antenne werkt op 400MHz en communiceert met satellieten die om Mars draaien. Deze uploadt dan de data met max 2 megabit/s naar de satelliet. De satelliet heeft veel grotere antennes en die kan op zijn beurt de data weer naar de aarde versturen.
De X-band antennes werken op 7 tot 8GHz en staan in directe verbinding met de aarde en kan zenden en ontvangen. De snelheid is 160/500 bits per second of sneller naar/van de Deep Space Network's schotelantennes (34 meter in diameter), of 800/3000 bps naar de 70-meter schotelantennes van DSN die in Spanje, de VS en Australie staan.
Enig idee waarom zo niet dichter bij de ijsmassa wil landen om sporen van leven te vinden?
En is er iets gekend over de software systemen? Maken ze gebruiken van een eigen OS/kernel, een unix variant? Of is het een linux kernel? RTOS? (Voor de synchronisatie hebben ze een Dropbox accountje? )
De kans dat er nu op Mars leven is is klein. IJsmassa's daarop analyseren kan wel, maar heeft minder kans van slagen dan rotsformaties waar ooit water is geweest en waar nu misschien nog fossiele resten zijn te vinden. Die rotsformaties zijn stabiel, in tegenstelling tot het ijs, dat nog wel eens smelt. Zoeken naar leven in water is veel beter te doen op plekken waar een goede kans op vloeibaar water is, zoals Europa. Daar is overigens ook een missie voor die binnenkort van start gaat.
De Perseverance maakt gebruik van dezelfde architectuur als Curiosity. Hier zijn veel details te vinden over de software in de Curiosity; voor de Perseverance verwacht ik grotendeels hetzelfde. Samengevat: ze maken gebruik van VxWorks, een real-time OS. Niet je standaard Linux kerneltje dus (hoewel Linux natuurlijk wel veel gebruikt wordt voor software/componenten buiten de rover zelf).
Het meeste ijs op of dicht onder het oppervlak is op de polen aanwezig. Op die polen slaat tijdens de Mars-winter ook veel CO2-ijs neer. De rover heeft dan een grote kans ingesneeuwd te raken in ijskoud CO2-ijs. Dan zal het zo koud worden dat zelfs de nucleaire batterij de apparatuur niet warm genoeg kan houden om de winter te overleven.
Ook zonder CO2-ijs zal het bij de polen al snel te koud worden.
After a rocket-powered descent stage, also known as the sky crane, delivered NASA's Curiosity rover to Mars on Aug. 5 PDT (Aug. 6 EDT), 2012, it flew away and fell to the surface.
Die landing stage crasht een stukje verderop inderdaad. Je kan in onderstaande video een animatie zien van het hele landingsproces, zoals dat bij Curiosity is gegaan. Perseverance zal hetzelfde doen, maar dit keer met meer camera's dus als alles goed gaat krijgen we echte videobeelden van de afdaling aan de parachute en de sky crane-operatie
Ik vraag me dan af waarom. Want het lijkt toch logisch dat er op meer plekken leven moet zijn met zo immens veel planeten om ons heen? Wat is er zo bijzonder als ze nu een levend organisme vinden op Mars?
De redenering dat er een behoorlijke kans is dat er elders leven bestaat (Vergelijking van Drake), staat in schril contrast met de complete afwezigheid van enige tastbare aanwijzingen ervan (Fermiparadox).
Het zou dan ook al waanzinnig zijn als we tastbare aanwijzingen vinden van vroeger leven, ook al is het er nu niet meer.
Meer nog, als we zelfs op onze naaste buur sporen van leven vinden,...
Correct me if i'am wrong, maar ik begreep dat er tegenwoordig alleen op koolstof gebaseerd leven wordt gezocht? We weten niet hoe andere vormen van leven eruit kúnnen zien, en kunnen dat daarom ook niet herkennen, laat staan ernaar zoeken.
Klopt tot op zekere hoogte.
Een nog levende, koude- en stralingsbestendige microscopische levensvorm op basis van siliconen of iets anders zal door de microscoop gezien kunnen worden wanneer het zich in een sample bevindt. Een fossiele vorm zal lastiger te onderscheiden zijn van een zandkorrel.
Daarnaast worden ook gasmonsters genomen en de minerale samenstelling van de bodem bekeken. Elk levend iets heeft bepaalde metabolische processen die nodig zijn om voor energie te zorgen om het leven te kunnen ondersteunen en om voortplanting mogelijk te maken. Die metabolische processen zullen afvalproducten produceren waarvan de vorming onder natuurlijke omstandigheden niet mogelijk is, of zo laag dat het niet meetbaar zou moeten zijn.
Daarnaast kennen we natuurlijk alleen op koolstof gebaseerd leven omdat dat het enige soort leven is dat we op Aarde kunnen waarnemen. Maar we weten wel hoe andere stoffen met elkaar reageren onder verschillende omstandigheden. En onder al die omstandigheden is er geen geschikte andere basis gevonden voor leven die energiegeneratie en -transport mogelijk maakt in een afgeschermde omgeving die niet door de omgeving buiten verstoord wordt.
Koolstof is erg reactief, maar kan sterke verbindingen vormen met andere elementen. Hierdoor zijn sterke structuren te maken die onder bepaalde omstandigheden erg stabiel zijn en onder zeer specifieke omstandigheden makkelijk zeer specifiek zijn te wijzigen. Silicium en zwavel hebben een paar van die eigenschappen, maar er zijn geen omstandigheden bekend (inclusief de bekende/ veronderstelde/ voorspelde omstandigheden elders in ons zonnestelsel) waarin die eigenschappen ook maar in de buurt komen van die van koolstof.
Koolstof heeft ook laten zien dat het tal van truckjes mogelijk maakt om in de meest bizarre en extreme omstandigheden op Aarde leven mogelijk te maken. Omstandigheden die een stuk extremer zijn dan de meest gunstige omstandigheden op andere planeten.
Het is dus niet zo'n vreemde veronderstelling om te denken dat leven buiten de Aarde waarschijnlijk ook op koolstof gebaseerd zal zijn (al zegt dat natuurlijk niets over de interne structuren, DNA-equivalent etc.) Maar zodra we idee krijgen wat een alternatieve basis voor leven zou kunnen zijn en wat daar de aanwijzingen voor zouden kunnen zijn, zal dat ongetwijfeld in toekomstige analyses worden opgenomen.
Mars is relatief dichtbij, er is meer over bekend, en minder extreem dan veel alternatieven. Dat maakt het interessant/uitdagend om als mensen te bezoeken, en voor dat dat gebeurt wil je zoveel mogelijk vooronderzoek doen én zoveel mogelijk onderzoek wat niet door menselijke aanwezigheid verpest wordt. Nasa (en de rest) zou graag ook andere plekken bezoeken/onderzoeken, en dat gaan ze ook doen, maar geld blijft een issue dus moeten er ook keuzes gemaakt worden.
Op Antarctica een veel voorkomende temperatuur en ook daar vind je leven. Sterker nog, als Mars ooit warmer is geweest en destijds leven heeft gehad kan het maar zo zijn dat er in ijslagen nog levende organismen zitten, Tardigrades bijvoorbeeld.
[Reactie gewijzigd door pagani op 23 juli 2024 10:05]
In Oost-Siberië kan het ook zomaar -70 graden worden (met een gemiddelde van -46 in januari) en daar leven toch ook mensen. Kwestie van jezelf goed aankleden voordat je naar buiten gaat
[Reactie gewijzigd door Standeman op 23 juli 2024 10:05]
Helaas zijn de enige gastvrije plekken voor leven die in de buurt zijn uitsluitend op aarde te vinden, en daar weten we al dat er leven is dus heeft het niet zo gek veel zin om daar te zoeken. (Maar soms komen we ook hier voor aangename verrassingen te staan, als we een of andere levensvorm in extreme omstandigheden aantreffen.)
We kunnen niet naar een plek op Mars waar het water zachtjes tegen de rotsen klotst met een zacht constant temperatuurtje van 20 graden Celsius, want zulke plekken zijn er niet. De gemiddelde temperatuur op Mars is -60, dus -90 is niet extreem naar martiaanse maatstaven. We weten al dat de kans op leven vinden op Mars zoals het nu is klein is, we kunnen dan ook het beste focussen op de plekken waar sporen van vroeger leven waarschijnlijk is, hoe onherbergzaam het nu ook is.
Er zijn exoplaneten in andere zonnestelsels die een goede kans maken op herbergzaam genoeg zijn voor leven, maar een missie naar zulke planeten is vele, vele malen uitdagender, ingewikkelder en duurder dan een missie naar Mars, en dat is al allesbehalve eenvoudig. Voorlopig kunnen we het daar alleen houden op observaties van een zeer behoorlijk afstandje. Zelfs maar sporen vinden van leven dat "anders" was dan dat op aarde zou dan ook al een enorme wetenschappelijke sprong vooruit zijn, en sporen vinden van leven dat juist heel erg lijkt op wat we op aarde hebben ook -- beiden geven nieuw inzicht.
Wat ik vooral leuk vind aan het artikel is dat steeds blijkt hoe belangrijk 'proven technology' in de ruimtevaart is.
Waar het hier natuurlijk vaak gaat over de nieuwste en laatste ontwerpen en ontwikkelingen, is het ook goed om dit concept eens uit te lichten. Hoeveel beter zouden we wellicht sommige apparatuur kunnen bouwen als we daarvoor 'gewoon' chips uit 1998 gebruiken die zichzelf inmiddels bewezen hebben en meer dan genoeg rekenkracht hebben voor alledaags gebruik.
Extreem dooron- en uitontwikkelde techniek is zonder meer belangrijk voor de ruimtevaart, je wil idd geen spectre/meltdown-taferelen in je marsrover hebben...
Maar kun je toelichten wat je bedoelt dat toepassen in dagelijks leven? In wat voor apparatuur? Ik zie mezelf niet achter een laptop met een Pentium II erin kruipen bijvoorbeeld
Ik kan ook niet bedenken welke apparatuur ooit (afgelopen 10-20 jaar ofzo) stuk is gegaan door een kapotte chip... Accu's, mechanische problemen, ja, silicium, nee
Extreem dooron- en uitontwikkelde techniek is zonder meer belangrijk voor de ruimtevaart, je wil idd geen spectre/meltdown-taferelen in je marsrover hebben...
Van alle problemen die je in de microcode tegen kunt komen zijn dingen als Spectre en Meltdown (die voor beveiligingsrisico's zorgen) dan wel weer je minste zorg. Als er al Marsmannetjes zijn die je rover willen hacken dan is dat alleen maar super interessant en zorgt het voor meer data om te analyseren.
Dit is niet alleen een kwestie van rekenkracht / proven technology. Als de transitoren steeds kleiner worden worden ze gevoeliger voor de invloed kosmische straling. Ook de hoeveelheid transitoren lijkt daarin een factor. Hier een kleine, erg beperkte uitleg, maar kon ff snel geen artikel vinden die er dieper op ingaat https://webwereld.nl/nieu...ld-van-de-kosmos-3772628/
En in dat geval is het inderdaad slimmer om een bestaand product op 150nm te pakken dan een nieuwe op die schaal te ontwikkelen
Wanneer we nu genoegen nemen met 20 jaar oude technologie voor doorsnee toepassingen, zullen we over 20 jaar genoegen moeten nemen met 40 jaar oude technologie, omdat er in de tussentijd weinig drang is geweest om de technologie te vernieuwen.
Waarom wordt er miljarden gestoken in honderden miljoenen kostende apparaten om de nieuwste, kleinste chips te fabriceren? Omdat die kosten binnen een paar jaar terug te verdienen zijn door die chips massaal in de nieuwste apparatuur te stoppen.
Natuurlijk zijn die geavanceerde chips in de meeste toepassingen absolute overkill. Maar in bepaalde gevallen maken ze dingen op bv. medisch/ wetenschappelijk gebied mogelijk die dat eerder nog niet waren.
En ik denk dat wanneer je in veel nieuwe, simpele toepassingen kijkt, je veel oude techniek in een nieuw jasje tegen zult komen..
Of het een microbe is of niet, het betekend dat de Aarde niet de enige plek is waar leven is geweest, en dat er dus meer plekken zijn waarop leven zich heeft weten te ontwikkelen. *of* dat leven blijkbaar elders ontwikkeld is, en daarna op beide planeten terecht is gekomen.
Vorige week een leuke reden gehoord waarom we alleen zijn:
De zon- en maanverduistering zijn (voor zover nu bekend) uniek in het hele heelal.
Als er ander leven was geweest dan was de aarde een toeristische trekpleister geweest voor buitenaards leven. Die hadden dan dit unieke spektakel ook willen zien.
Aan de ene kant geeft het hele vervelende complicaties als we niet alleen zijn, maar aan de andere kant zou het ook mogelijkheden kunnen bieden.
En dan ook nog afhankelijk wat voor leven er buiten de aarde om te vinden zou zijn.
Helaas is het onzin. Bijvoorbeeld Jupiter heeft ook zonsverduisteringen. Sterker nog, daar komt het veel vaker voor door het enorme formaat van Jupiter en het feit dat er liefst vijf manen (Amalthea, Io, Europa, Ganymede en Callisto) zijn die een zonsverduistering kunnen veroorzaken.
[Reactie gewijzigd door pagani op 23 juli 2024 10:05]
Ik denk dat @Haunting_Spirit doelt op het feit dat de afstand aarde-maan en aarde-zon, en de afmetingen van deze objecten, dusdanig zijn dat de maan (nagenoeg) precies de zon afdekt. Dat is uniek voor ons zonnestelsel. Of dit gegeven ook uniek is voor het complete heelal laat ik over aan sterrenkundige en statistici.
Hoe maken we contact, hoe dragen we uit dat we vredelievend zijn naar hen toe ondanks dat we onder de mensen zelf geen vrede kunnen bewaren, zijn ze gevaarlijk etc. als ze al verder geavanceerd zijn dan ons.
Als het microscopisch leven is/was hoe gaan dan alle religies er mee om en wat betekend dat voor toekomstige wetenschappenlijke ontdekkingen etc.
Religies zullen weinig tot geen problemen ondervinden door de ontdekking van buitenaards leven, zeker als dat leven niet intelligent is. Bij heel weinig religies is het een essentieel punt dat leven alleen op aarde zou bestaan. Je kunt gewoon zeggen "wel, de lieve Heer/Scheppende Kracht/Zonnegodin (haal door wat niet van toepassing is) heeft in zijn/haar/hun wijsheid besloten ook leven op Mars te maken, al is het natuurlijk niet hetzelfde als wij, de mens" en daarmee is de kous dan waarschijnlijk wel af. Het ontbreken in de heilige geschriften kunnen we uitleggen als het niet willen verwarren van onze voorouders, door ze kennis geven waar ze toch niets mee konden. Kennis over de samenstelling van de atmosfeer van Mars staat daar tenslotte ook niet in.
Als de geschiedenis enige indicatie is dan zal een uitdaging voor een orthodoxe overtuiging er uiteindelijk toe leiden dat de orthodoxen in aantal afnemen en/of de nieuwe feiten anders uitgelegd worden en/of er een groepje zal zijn dat e.e.a. gewoon hardnekkig ontkent in weerwil van alles. De tijd dat zoiets tot heftige onlusten en oorlogen kon leiden onder grote groepen ligt voor wat betreft wetenschappelijke kennis alweer een tijdje achter ons (hoewel het tegenwoordig een comeback lijkt te maken, dus laat ik dat niet te stellig roepen...)
Voor de wetenschap is het alleen maar super interessant om meer te weten over het hoe en waarom van leven, ongeacht welke vorm die kennis heeft. Dat is het fraaie van wetenschap.
Ik vind het altijd interessant dat de mens denkt vredelievend te zijn. Het feit dat we het heelal onderzoeken om ooit eens de aarde permanent te kunnen verlaten impliceert voor mij dat we bij het vinden van een andere bewoonbare planeet deze ook willen 'koloniseren'. We doen dit in mijn beleving dan ook vanuit onze natuurlijke overlevingsdrang en niet om samen met ander leven te delen.
Lang verhaal, maar het komt er in wezen op neer dat wij lagere levensvormen waarschijnlijk uitroeien. Hogere levensvormen die we tegen komen doen dat ook, alleen zijn wij dan de lager levensvormen.
[Reactie gewijzigd door Rakkachi op 23 juli 2024 10:05]
Behalve dat je alleen al in het melkwegstelsel 100 miljard sterren af moet gaan, ieder met een n aantal planeten. De kans dat buitenaards leven toevallig de Aarde tegenkomen is al niet zo denderend groot. Dan moet je er daarbij ook nog vanuit gaan dat dat buitenaards leven de middelen heeft om te ontdekken dat wij een maan om ons heen hebben draaien, die precies groot genoeg is en op de juiste afstand van de Aarde staat om te berekenen dat hij voor een mooie zonsverduistering kan zorgen.
Op dit moment hebben wij zelf enkel de mogelijkheid om te detecteren of er ergens een planeet om een ster draait, puur en alleen omdat we kunnen zien dat de lichtoutput van die ster richting ons voor een fractie daalt.
De kans is gewoon gigantisch groot dat er misschien wel ander (intelligent) leven in het universum bestaat, maar dat we het simpelweg gewoon nooit gaan tegenkomen vanwege de schaal van het universum.
Zonsverduisteringen zijn niet uniek in het hele heelal en maansverduisteringen al helemaal niet. Ik heb zelf vele maansverduisteringen waargenomen bij Jupiter en Saturnus, zelfs met een kleine telescoop kun je de manen al in de schaduw van de planeet zien verdwijnen. Het enige wat uniek is aan de Aarde - Maan combinatie is dat de Maan de Zon exact afdekt zodat de corona zichtbaar wordt. Dit is echter maar een tijdelijk verschijnsel omdat de Zon langzaam groter wordt en de Maan steeds verder van de Aarde af komt te staan dus ooit is een totale zonsverduistering onmogelijk geworden. "Tijdelijk" is natuurlijk een relatief begrip want het duurt nog honderden miljoenen jaren voordat het zover is.
Maar misschien is zonder dat wij het weten de Aarde allang een toeristische trekpleister, alleen denk ik dat het dan een combinatie van een openluchtmuseum en de Apenheul is.
Als een buitenaardse beschaving de middelen heeft om naar de aarde te komen, dan kunnen ze natuurlijk ook in willekeurig welk zonnestelsel op de juiste afstand van een ster/planeet combinatiegaan hangen met hun ruimtetuig om op iedere moment een perfecte zonsverduistering te zien...
Als ik lees hoeveel sterren en planeten er zijn, dan denk ik dat het heelal vol leven zit.
Vroeger dachten we dat we 'the centre of the universe' waren, daarna stond de zon centraal, nu zien we dat we ergens in een uithoek van de melkweg zitten. Ik denk niet dat we zo speciaal zijn...
Zelfs áls er sporen van vroeger (moleculair) leven op Mars worden gevonden (en persoonlijk acht ik die kans niet heel groot, maar het zou de vondst van de eeuw zijn) zou dit nog altijd kunnen betekenen dat we "alleen" zijn, in de zin dat we de enige intelligente levensvorm zijn die ooit het universum gaat verkennen, of in ieder geval de enige zonder dat we de rest tegenkomen. Er zijn namelijk nog wel wat meer barrières te slechten daarvoor dan puur de mogelijkheid om leven te huisvesten.
Wel zou het vinden van (eerder) leven op Mars het natuurlijk stukken waarschijnlijker maken dat er ergens zulk leven te vinden is, maar het zou nog steeds verre van een gegeven zijn. Daarnaast zou het ons geweldig inzicht geven in de oorsprong en aard van het leven zelf, kennis die we ook op het leven op aarde kunnen toepassen.
Wetenschap gaat echter sowieso nooit uit van wat we zouden willen dat waar is. Wat we zouden moeten willen is geloven in de dingen die waar worden bevonden, of we de gevolgen daarvan nu fijn vinden of niet.
[Reactie gewijzigd door MneoreJ op 23 juli 2024 10:05]
Mochten ze sporen van (fossiel) leven vinden op Mars, dan is dat m.i. een goede motivator om nog een stapje verder in ons zonnestelsel op zoek te gaan naar leven -denk aan Europa of Enceladus- of misschien wel voor de eerste 'probes' richting de dichtstbijzijnde ster.
Naar Europa gaan we sowieso al om te kijken of er vloeibaar water is. Mochten we inderdaad slagen op Mars dan zijn zulke missies natuurlijk extra veelbelovend. Naar een exoplaneet zou helemaal mooi zijn, natuurlijk, maar dat is wel een flinke stap extra onzekerheid (en het duurt zo lang op een mensenleven )
Persoonlijk zou ik het al prachtig vinden als we leven zouden vinden op Europa, wat nog binnen onze levensduur zou kunnen gebeuren. Wat een coup zou dat zijn!
De landing van de Curiosity in augustus 2012 is zeer netjes gegaan, hopelijk gaat de reis en landing van de Perseverance net zo goed en ik kijk al uit naar de spectaculaire beelden van de landing.
Het zal uiterst moeilijk worden om definitief vast te stellen of er ooit leven is geweest op Mars. Zelfs als we duidelijke sporen vinden dan zal er waarschijnlijk nog heel lang twijfel blijven bestaan over of wat we zien, inderdaad is wat we denken dat we zien. Misschien moet het wachten tot er mensen op mars landen die daar zelf onderzoek gaan doen voordat we er echt van overtuigd zullen zijn dat er waarschijnlijk, vele miljoenen jaren geleden, leven is geweest. Het zou één van de spectaculairste ontdekkingen in de wetenschap ooit zijn.
Dat we er rechtstreeks met onze eigen klauwen aan moeten zitten voor we overtuigd zijn lijkt me pessimistisch. Perseverance gaat tenslotte ook monsters achterlaten die wellicht later naar de aarde gestuurd kunnen worden, daarvoor hoeven we er niet per se naartoe. Als dat een succes blijkt zet het natuurlijk de deur open naar veel meer mogelijkheden om monsters te nemen en te analyseren.
Mocht zo'n monster nu inderdaad echt een fossiel van een microscopische levensvorm bevatten (waarvan we waarschijnlijk redelijk snel vast kunnen stellen dat het met geen mogelijkheid een aardse levensvorm kan zijn die de boel vervuild heeft) dan zal er ook snel weinig twijfel meer zijn. De kans daarop is natuurlijk niet heel groot, maar bewijs dat definitief is kan wel, wil ik maar zeggen.

:strip_exif()/i/2003715084.jpeg?f=imagegallery)
:strip_exif()/i/2003729262.jpeg?f=imagegallery)
:strip_exif()/i/2003724936.jpeg?f=imagegallery)
:strip_exif()/i/2003725492.jpeg?f=imagegallery)
:strip_exif()/i/2003724976.jpeg?f=imagegallery)
:strip_exif()/i/2003725556.jpeg?f=imagegallery)
:strip_exif()/i/2003725560.jpeg?f=imagegallery)
:strip_exif()/i/2003725558.jpeg?f=imagegallery)
/i/2003725562.png?f=imagearticlefull)
:strip_exif()/i/2003725482.jpeg?f=imagegallery)
:strip_exif()/i/2003725480.jpeg?f=imagegallery)
:strip_exif()/i/2003725478.jpeg?f=imagegallery)
:strip_exif()/i/2003693354.jpeg?f=imagegallery)
:strip_exif()/i/2003693356.jpeg?f=imagegallery)
:strip_exif()/i/2003693352.jpeg?f=imagegallery)

:strip_exif()/i/2003725438.jpeg?f=imagegallery)
:strip_exif()/i/2003725548.jpeg?f=imagegallery)
:strip_exif()/i/2003725436.jpeg?f=imagegallery)
:strip_exif()/i/2003725434.jpeg?f=imagegallery)


:strip_exif()/i/2003725452.jpeg?f=imagegallery)

:strip_exif()/i/2003681376.jpeg?f=imagearticlefull)
:strip_exif()/i/2003729260.jpeg?f=imagegallery)
:strip_exif()/i/2003725512.jpeg?f=imagearticlefull)

:strip_exif()/i/2003725694.jpeg?f=imagegallery)
:strip_exif()/i/2003725702.jpeg?f=imagegallery)




:strip_exif()/i/2003727266.jpeg?f=imagenormal)
/i/2003727202.png?f=imagenormal)
:strip_exif()/i/2003727290.jpeg?f=imagearticlefull)

:strip_exif()/i/2003727446.jpeg?f=imagegallery)
:strip_exif()/i/2003727448.jpeg?f=imagegallery)
:strip_exif()/i/2003725576.jpeg?f=imagearticlefull)
:strip_exif()/i/2003727638.jpeg?f=imagenormal)
:strip_exif()/i/2003725724.jpeg?f=imagegallery)
:strip_icc():strip_exif()/i/2005273988.jpeg?f=fpa_thumb)
:strip_icc():strip_exif()/i/2004935464.jpeg?f=fpa_thumb)
:strip_icc():strip_exif()/i/2004167472.jpeg?f=fpa_thumb)
/i/2004696860.png?f=fpa)
:strip_exif()/i/2004935466.jpeg?f=fpa)
:strip_exif()/i/2004881670.jpeg?f=fpa)
/i/1261474170.png?f=fpa)
/i/1241362271.png?f=fpa)
:strip_exif()/i/2004318028.jpeg?f=fpa)
:strip_exif()/i/2003727872.jpeg?f=fpa)
:strip_exif()/i/2004169982.jpeg?f=fpa)
/i/1345536963.png?f=fpa)
:strip_exif()/i/2003864640.jpeg?f=fpa)
/i/1300720051.png?f=fpa)
:strip_exif()/i/2003739314.jpeg?f=fpa)
:strip_exif()/i/2000644849.jpeg?f=fpa)
:strip_icc():strip_exif()/u/323231/crop5fa2607b0098a_cropped.jpeg?f=community)
/u/727812/crop5c893c9ed11f9.png?f=community)
:strip_icc():strip_exif()/u/221764/crop575bedfb21641.jpeg?f=community)
:strip_icc():strip_exif()/u/392468/crop5e9cb675e8fbd_cropped.jpeg?f=community)
/u/1115605/crop5b9a248eb702f_cropped.png?f=community)
:strip_icc():strip_exif()/u/81611/headcrop.jpg?f=community)
:strip_icc():strip_exif()/u/55486/crop6597c6403e549_cropped.jpg?f=community)
:strip_icc():strip_exif()/u/444626/crop619e64cd1f0d1_cropped.jpg?f=community)
:strip_exif()/u/94091/lynxa.gif?f=community)
/u/12607/crop5fa30891b335d.png?f=community)
:strip_icc():strip_exif()/u/3228/crop5d113bdb41aeb_cropped.jpeg?f=community)
/u/40371/pino.JPG?f=community)
:strip_icc():strip_exif()/u/14409/crop560ebcbcc3d04_cropped.jpeg?f=community)
:strip_icc():strip_exif()/u/132443/crop62deab1dcf2c6.jpg?f=community)
/u/45865/crop62338715be02f.png?f=community)
/u/247151/moppersmurf-60px.png?f=community)
:strip_icc():strip_exif()/u/336275/crop5ec91d7cd4e69.jpeg?f=community)
/u/381607/have%2520a%2520nice%2520day%2520-%2520small.png?f=community)
/u/28429/crop59eb40ac5dc83_cropped.png?f=community)
:strip_icc():strip_exif()/u/84149/sjaap-klein.jpg?f=community)
:strip_icc():strip_exif()/u/153263/crop5dc2fc5fe8562.jpeg?f=community)