Een nietsvermoedende wandelaar die wordt bestookt met vernietigende laserstralen: dat lijkt een scène uit een sciencefictionfilm die zich lang geleden afspeelde in een sterrenstelsel hier ver, ver vandaan. Ongetwijfeld waande robotontwikkelaar en ondernemer Jit Ray Chowdhury zich dan ook veilig toen hij eerder deze maand, gewapend met zijn Sony A7R II-camera, vol goede moed de beursvloer van de Consumer Electronics Show betrad. Op dit jaarlijkse technologiefestijn in Las Vegas is meer dan genoeg interessante technologie te vinden om mooie plaatjes te schieten. Een van de vastgelegde objecten schoot echter terug. Op een Jaguar-auto had het bedrijf AEye een functionerende lidar geplaatst. Tijdens een demonstratie moest het lidarsysteem een pijl van een nerfgun volgen. De onzichtbare pulsen werden pas zichtbaar toen Chowdhury door zijn afbeeldingen bladerde en merkte dat ze allemaal waren voorzien van twee onbedoelde, heldere, paarse vlekken waar horizontale en verticale lijnen uit komen.
Dit werd veroorzaakt door brandplekken in de camerasensor. Hij had de 'dader' al snel gevonden: het lidarsysteem van AEye. De ceo van de start-up ontkende niet dat zijn lidars schade kunnen aanrichten aan camerasensoren. Het ging hierbij om laserlicht met een golflengte van 1550nm. Dat is veilig voor het menselijk oog, maar onder bepaalde omstandigheden niet voor een camerasensor. Laserlicht met golflengtes van 905 of 850nm kan in theorie wel een probleem opleveren voor het menselijk oog, maar bij snel roterende lidarsystemen speelt dat veel minder en veelal is het vermogen van individuele laserpulsen bijzonder laag.
Laserstralen die vanaf het dak van auto's worden uitgezonden, zijn al een aantal jaren realiteit. Google-zusterbedrijf Waymo bijvoorbeeld rijdt in de stad Phoenix rond met Chrysler Pacifica-minivans die zijn uitgerust met op het dak gemonteerde, ronddraaiende, sireneachtige koepels. Deze zijn voorzien van verschillende lidars om de omgeving rond de auto in real time in kaart te brengen. Het laserlicht brengt de omgeving letterlijk in kaart. De software gebruikt de data die dat oplevert, om de auto veilig te laten deelnemen aan het verkeer zonder dat er nog een menselijke bestuurder aan te pas hoeft te komen.
In dit artikel gaan we onder meer in op de vraag wat lidars precies zijn en waarom ze belangrijk lijken voor de ontwikkeling van zelfrijdende auto's. Daarbij zoomen we onder meer in op de verschillende soorten en de ontwikkelingen op het gebied van lidarsensoren. Ook staan we stil bij alternatieven, want hoewel de industrie stevig inzet op lidars en er honderden miljoenen dollars in pompt, rijden Tesla's in de Autopilot-modus rond zonder van lidars gebruik te maken.
Wat is lidar en waar is het voor nodig?
'Lidar' is een afkorting die te vergelijken is met 'radar', wat staat voor radio detection and ranging. De term radar is echter allang ingeburgerd en is zodoende volledig geaccepteerd als zelfstandig woord, waarbij de volledige formulering nog zelden wordt gehanteerd. Datzelfde gaat ongetwijfeld ook ooit gebeuren met lidar, mits deze systemen daadwerkelijk dominant worden bij zelfrijdende auto's. Lidar is een afkorting voor light detection and ranging. Uitgeschreven lijkt dit erg op radar. Er zijn dan ook overeenkomsten; zowel bij radar als bij lidar worden signalen uitgezonden om vooral de afstand tot objecten te bepalen. Het grote verschil is dat dit bij radar gebeurt door het uitsturen van radiogolven; lidars maken in plaats daarvan gebruik van laserlicht.
Waarom is lidar nodig?
Waarom is een dergelijk systeem, gebaseerd op licht, eigenlijk nodig? De op radiogolven gebaseerde radars hebben tenslotte een vergelijkbare functie. Jada Tapley, adjunct-directeur van het mobiliteitsbedrijf Aptiv, is daar duidelijk over. "Stel je voor dat er midden op de weg een loopvlak van een autoband ligt, afkomstig van een grote vrachtwagen. Radar zal dat niet detecteren, maar lidar wel." Aptiv is overigens het bedrijf dat de autonoom rijdende Lyft-auto's bouwde die in 2018 gebruikt werden voor het vervoeren van personen in Las Vegas, in het kader van de CES-beurs. De vaststelling van Tapley heeft te maken met de golflengte van radiogolven, die beduidend groter is dan die van laserlicht. Dat betekent dat als kleine objecten worden aangestraald door radiogolven, er een grote kans is dat onvoldoende energie wordt teruggekaatst om te worden gedetecteerd. De veel kleinere golflengte van lasers leidt ertoe dat ook kleine objecten worden gezien; de resolutie is bij lidar dus een stuk fijnmaziger dan bij radar, ook al heeft radar het voordeel dat het over een langere afstand werkt, doordat er minder sprake is van absorptie.
Bij de meeste lidars wordt de afstand tot een object in kaart gebracht op basis van de tijd die verstrijkt tussen het moment van het uitzenden van de puls en het moment waarop de gereflecteerde puls wordt opgevangen, wat time-of-flight wordt genoemd. Lidar-sensoren zijn er in allerlei soorten en maten, waarbij een sensor uit bijvoorbeeld een enkele laser, 16 stuks of zelfs 128 lasers kan bestaan. Ook de frequenties variëren nogal: van enkele tienduizenden pulsen tot een miljoen of meer per seconde. Na het scannen van de pulsen in verschillende richtingen levert dit een driedimensionale puntenwolk op, waarbij elke punt zijn eigen x-, y- en z-coördinaten heeft. De ruimtelijke en diepte-informatie van deze puntenwolk is bijvoorbeeld bruikbaar om objecten te identificeren en te volgen.
Dit is wat de Velodyne HDL-64E 'ziet'. De 64 lasers leiden tot 64 lijnen met data.
Lidars en de eventuele daarop gebaseerde 3d-kaarten worden allerminst alleen bij zelfrijdende auto's gebruikt. De politie gebruikt lidars in de vorm van laserguns die pulsen met golflengtes van 904nm afvuren om snelheidsduivels op de bon te slingeren. Archeologen en geografen gebruiken ze bijvoorbeeld om terrein in kaart te brengen. Hoe meer pulsen per seconde worden afgevuurd, hoe preciezer de puntenwolk is. Lidar was in de begindagen van het gebruik door archeologen nauwelijks bruikbaar, doordat de frequentie te wensen overliet. Wetenschapper William E. Carter zei dat lidars vroeger, in de jaren zeventig, niet verder kwamen dan 5000 pulsen per seconde. Als je daarmee een vliegtuig uitrustte voor archeologisch onderzoek, 'kon je je hele leven lang over de bomen vliegen zonder enig resultaat'. De meeste pulsen ketsten af van bladeren en waren daardoor nooit in staat de grond te bereiken. Bij het huidige onderzoek is de frequentie 600.000 pulsen per seconde, waarbij sprake is van vier 'stops per schot'. Het lidarsysteem kan per puls als het ware door drie obstakels heen kijken, waarbij het vierde object de grond is.
Waaruit bestaat een lidarsysteem?
Voor een gemiddeld lidarsysteem is meer nodig dan enkel een laser. Om de pulsen uit te zenden, worden bijvoorbeeld snel roterende polygoonscanners gebruikt, waarbij de scanner ook de hoek meet waaronder de pulsen via een spiegel worden afgeschoten. Daarnaast is een plaatsbepalingssysteem zoals gps nodig om de datapunten te kunnen combineren met de x-, y-, en z-coördinaten van de scanner, zeker als de lidar wordt gebruikt op een bewegend voertuig of vliegtuig. Daarbij mag ook een inertial measurement unit niet ontbreken. Dit apparaat bestaat uit een versnellingsmeter, een gyroscoop en een magnetometer die gezamenlijk de oriëntatie van de scanner ten opzichte van de grond meten. Verder is een fotodetector nodig om de teruggekaatste pulsen te registreren. Tot slot is een precieze klok nodig om te registreren hoe lang een puls erover doet om na het afvuren terug te keren.
Solidstate- of traditioneel ronddraaiende lidar
Als het gaat om lidars, zijn er allerlei onderverdelingen te maken. Waarschijnlijk een van de belangrijkste is die van solidstatelidars versus traditionele lidars. Traditionele lidars zijn elektromechanisch en dus gebaseerd op bewegende onderdelen die accuraat moeten werken om autonoom navigeren te laten functioneren. De laserscanner en de fotodetector moeten ronddraaien om zodoende de omgeving in 360 graden te kunnen scannen.
De lidars die het Amerikaanse bedrijf Velodyne in 2005 vervaardigde, zijn bijvoorbeeld te beschouwen als systemen die zijn gebaseerd op het principe van roterende sensoren. De door de broers David en Bruce Hall gemaakte HDL-64 bevat 64 lasers die zijn gemonteerd op een roterende gimbal. Dat was destijds een innovatie, zo bleek tijdens een door het Amerikaanse defensie-instituut Darpa georganiseerde off-roadwedstrijd voor auto's zonder bestuurder. Bij deze Darpa Grand Challenge uit 2005 deden de broers mee als Team DAD. Ze wisten niet te finishen; hun lidarscanner hield ermee op nadat een draadje los kwam te zitten door de trillingen. Overigens slaagden zeventien andere deelnemers er ook niet in de finish te bereiken; slechts vijf teams wisten het 212 kilometer lange parcours met drie nauwe tunnels en meer dan honderd nauwe bochten succesvol af te leggen.
Michael Dunbar, manager bij Velodyne, zei dat het bedrijf destijds aanliep tegen de beperkingen van de lidarsystemen die toen op de markt waren. Dit waren systemen die in een vaste richting scanden voor objecten. Op basis daarvan kwam David Hall met zijn eigen lidar met 64 lasers met een snelheid van 300 tot 900 rotaties per seconde, waarbij het blikveld aanzienlijk werd verruimd naar 360 graden om de auto. Deze HDL-64 wist 1.000.000 datapunten per seconde te creëren, terwijl eerdere systemen niet verder kwamen dan 5000 datapunten per seconde. Velodyne deed in de volgende Grand Challenge in 2007 niet meer mee als team, maar het bedrijf wist zijn HDL-64-lidar wel te verkopen aan tien deelnemers van de race uit 2007. Deze HDL-64-lidar wordt in een verder ontwikkelde vorm nog altijd gebruikt.
Solidstatelidars
Velodynes nieuwe, roterende lidar was een flinke stap vooruit, maar inmiddels is een alternatief steeds populairder aan het worden: de solidstatelidar. Onder meer het bedrijf Quanergy van de wetenschapper en ondernemer Louay Eldada is een belangrijke speler op de markt voor solidstatelidars. Dit bedrijf keek voor inspiratie naar radars. In de vroege dagen draaiden radars ook rond, maar dat was niet meer nodig na de komst van antennearrays. Antennearrays kunnen radiogolven in elke richting uitsturen zonder de noodzaak van rotatie. Hierbij wordt gebruikgemaakt van een opstelling van kleine antennes. Door het bepalen van de timing tussen elke antenne die een signaal uitzendt, is het mogelijk om een signaal in een specifieke richting te zenden. Door elk individueel antenne-element met een vertraging radiogolven te laten uitzenden, waardoor elke antenne zijn signalen later uitzendt dan de antenne eronder, kan de resulterende vlakke golf onder een bepaalde hoek worden gestuurd. Door het elektronisch aanpassen van de fasen kan de hoek van de straal worden veranderd.
Eldada licht toe dat hij dit principe heeft toegepast bij licht. "We hebben een groot aantal, vaak een miljoen optische antenne-elementen. Op basis van hun faseverhouding tot elkaar vormen ze een stralingspatroon van een bepaalde omvang dat een bepaalde kant op wordt gericht." Door de timing van het uitstralen van het licht door de miljoen individuele zenders heel precies te controleren, kan het licht als het ware gestuurd worden. "De interferentie bepaalt in welke richting het licht gaat, niet een bewegende spiegel of lens", aldus Eldada. Om dit mogelijk te maken, is enkel silicium nodig; Quanergy gebruikt verschillende chips in zijn systemen.
Naast deze optische antennearraysystemen zijn er nog twee andere systemen die onder de verzamelterm solidstatelidar vallen, omdat ze geen bewegende onderdelen hebben: flashlidars en mems-spiegels. Strikt genomen hebben mems, ofwel microelektromechanische systemen, wel bewegende onderdelen, namelijk heel kleine, bewegende spiegels, maar dat staat in geen verhouding tot de bewegende delen van traditionele elektromechanische lidars.
Bij mems is sprake van een enkele laser die door een enkele kleine spiegel wordt gestuurd. Het wordt echter ingewikkelder als de laser niet alleen horizontaal, maar ook verticaal moet kunnen bewegen. Dan is weer een andere spiegel nodig, of verschillende lasers. Volgens Tapley is het daarbij ook lastig om alles perfect met elkaar in lijn te brengen. Spiegels die roteren op beide assen, kunnen kwetsbaar zijn voor schokken en trillingen, wat bij rijdende auto's nogal eens aan de orde is. Er zijn echter meer uitdagingen. "Mems-spiegels drijven uit hun uitlijning, ze houden hun kalibratie niet vast. Als er grote temperatuurverschillen zijn, moeten ze op den duur geherkalibreerd worden. Als ze vast komen te zitten, krijg je te maken met problemen voor de veiligheid van het menselijk oog. En zonlicht dat het systeem binnenkomt, kan het signaal ernstig verstoren", aldus Eldada.
Innoluce, een voormalig onderdeel van Philips dat is overgenomen door Infineon, heeft een solidstatelidar ontwikkeld met mems-spiegels ter grootte van een millimeter
Flashlidars maken, zoals de naam suggereert, gebruik van lichtflitsen en werken in feite als camera's. Een of meer lichtbronnen zenden licht uit in alle richtingen, waarna fotodiodeontvangers en beeldsensoren het teruggekaatste licht opvangen en verwerken in een puntenwolk, op basis van een algoritme dat kijkt naar de tijd dat het licht onderweg was. Bij reguliere flashlidars wordt met een enkele flits of puls het hele gezichtsveld verlicht.
Het probleem is echter dat om ver te kunnen zien, een sterke lichtbron nodig is, wat het geheel duurder maakt. Die lichtpuls mag niet zo sterk worden dat hij gevaarlijk is voor onze ogen. Dat is op te lossen door licht uit te zenden op golflengtes die ongevaarlijk zijn voor het netvlies, maar goedkope op silicium gebaseerde beeldsensoren kunnen geen licht detecteren op die golflengtes. Sensoren op basis van galliumarsenide kunnen dat wel, maar dat voert de kosten op tot wel 200.000 dollar. "Je hebt een extreem krachtige lichtbron nodig of een extreem gevoelige ontvanger; zonder dit heb je slechts een beperkt bereik", stelt Eldada. Doordat elk type solidstatelidar zo zijn eigen voor- en nadelen heeft, wedt Quanergy niet op één paard, maar ontwikkelt het solidstatelasers van deze drie typen.
Cwfm-lidars
Er zijn ook ontwikkelingen op een ander vlak die voorbijgaan aan het onderscheid tussen solidstate- en roterende lidars. Bij de meeste hedendaagse lidars wordt de tijd, en daarmee de afstand, gemeten die een laserstraal aflegt. Dit is de time-of-flight-methode, waarbij een heel accurate klok meet hoe lang het duurt voordat de laserpuls is teruggekaatst. Er is echter ook een andere methode: continuous-wave frequency modulation. Simpel gezegd worden hierbij geen pulsen, maar een continue laserstraal op een object afgevuurd, waarbij de frequentie voortdurend lineair wordt gevarieerd. Een tweede referentiesignaal interfereert vervolgens met het vertraagde teruggekaatste signaal, zodat een interferentiepatroon ontstaat met een zwevingsfrequentie, die wordt bepaald door de afstand die de laserpuls heeft 'afgelegd'.
Deze technologie heeft enkele belangrijke voordelen. Allereerst zijn cwfm-lidars vrijwel immuun voor achtergrond- of omgevingslicht. Een lidar op basis van time-of-flight kan in de war raken als er andere lichtbronnen zijn met dezelfde frequentie, maar het licht dat cwfm-lidars uitsturen, heeft daar geen last van en is volgens een technicus van Lockheed Martin zelfs te gebruiken bij schittering van de zon.
Bovendien zijn de afstand tot en de snelheid van een object in kaart te brengen. Dat komt door het dopplereffect. Door dit effect verandert de frequentie van golven die worden teruggekaatst door bewegende objecten. Er moet wel eerst uitgevogeld worden wat er is gebeurd als de frequentie verandert, want er is een samenspel van de bewuste variaties en het dopplereffect. Als dat onderscheid echter duidelijk is, is zowel de afstand als de relatieve snelheid te meten. Als op basis van time-of-flight slechts één frequentie wordt gemeten, is niet te zeggen of een object in beweging was.
Het direct kunnen meten van de snelheid is een belangrijk voordeel. Er is dan in principe geen rekenkracht nodig om niet-bewegende en bewegende objecten van elkaar te onderscheiden. Op basis van de verschillende opeenvolgende frames van een puntenwolk, waarbij bijvoorbeeld elke 100ms een nieuw frame wordt geproduceerd, kan zomaar een vertraging optreden. Het gaat dan om een vertraging van enkele frames, pakweg 300 of 400ms; pas daarna kan de mate van beweging worden vastgesteld en daarmee de snelheid. Dit werkt, maar met een cwfm-lidar is die vertraging afwezig. Door rekening te houden met het dopplereffect is ook eenvoudiger onderscheid te maken tussen twee objecten die zich vlakbij elkaar bevinden en waarbij een snelheidsverschil aanwezig is, bijvoorbeeld een auto die een busje inhaalt.
Tesla gaat zijn eigen weg
Het gros van de deskundigen op het gebied van rijhulpsystemen, een veelheid aan autofabrikanten, en ook bedrijven als Waymo en Uber die aan zelfrijdende autodiensten werken, zijn het erover eens dat lidar onmisbaar is voor een toekomst waarin bestuurders definitief op de achterbank kunnen plaatsnemen. Er is echter in ieder geval één stem die daar heel anders tegenaan kijkt. Elon Musk, de topman van Tesla, snapt weinig van het geloof in lidar. Systemen die gebruikmaken van het bereik van radar zijn volgens Musk beter, omdat ze door kleine obstructies heen kijken. 'Het is nogal raadselachtig dat bedrijven kiezen voor het actief genereren van fotonen in de verkeerde golflengte'. Hij vindt het gebruik van golflengtes in het laserspectrum 'duur, lelijk en onnodig'. "Misschien zit ik ernaast en lijk ik straks een idioot, maar ik ben er vrij zeker van dat dat niet geval is", aldus Musk.
Tesla-auto's met de autopilotfunctie komen toch ook al een heel eind zonder brokken te maken. En dat zonder lidar. Het alternatief dat deze auto's gebruiken, zijn acht camera's, aangevuld met een radar, gps en twaalf ultrasone sensoren. Kortom, het gaat bij Tesla's om een systeem dat is gebaseerd op optische herkenning en daar lijkt Musk heilig in te geloven. "Zodra je het probleem van camera's voor visie oplost, is ook autonomie opgelost. Je kunt absoluut bovenmenselijk zijn met alleen camera's." Daarmee doelt hij op de uitdaging om passieve, optische beeldherkenning dermate ver te ontwikkelen dat zij goed genoeg is voor autonoom rijden. Actieve optische systemen, waar Musk lidar onder schaart, zijn dan volgens hem niet meer nodig. Zodra het neurale netwerk maar goed genoeg is en van voldoende data wordt voorzien, is autonoom rijden volgens hem ook mogelijk in lastige weersituaties. Toch houdt Musk er dus ook nog rekening mee dat hij niet op de juiste weg zit en vooralsnog is het 'visieprobleem' nog niet opgelost.
General Motors zet in op lidar
Andere bedrijven varen een heel andere koers. Zo maken de minivans van Waymo gebruik van 3 verschillende lidars, 5 radars en 8 camera's. Dat kan nog beter, zal General Motors gedacht hebben. Bij de Cruise AV maakt de fabrikant gebruik van 5 lidars, 21 radars en 16 camera's. Volgens het bedrijf is dat noodzakelijk om 'perceptiefuncties' te kunnen uitvoeren. GM zegt dat de gecombineerde data die al deze sensoren verzamelen, door het zogeheten Perception-systeem wordt gebruikt om objecten of subjecten te herkennen, classificeren en hun locatie te bepalen, inclusief hun snelheid en richting. Perception bouwt in combinatie met kaartgegevens een 3d-wereld waarin belangrijke objecten worden gevolgd en ook hun toekomstige bewegingen worden voorspeld, aldus de Amerikaanse autobouwer. En als er ergens een onzekerheid is over een gebied, bijvoorbeeld omdat het zicht door slecht weer wordt gehinderd, wordt dat gebied als 'onbekend' aangemerkt en past de computer het rijgedrag daar automatisch op aan, stelt de fabrikant.
Tesla-ongelukken en de gestelde noodzaak van lidar
Wat toepassingen zoals die van Waymo en General Motors duidelijk maken, is dat ze lidar als een centraal onderdeel van hun autonome systemen zien. Verschillende critici stellen dan ook dat Tesla vroeg of laat moet terugkomen op de beslissing om lidar links te laten liggen, waarbij ook weleens wordt gewezen op enkele ongelukken met Tesla-auto's waarbij de autopilot werd gebruikt.
Zo was er in 2016 in Florida een dodelijk ongeval waarbij een Model S op een witte truck botste terwijl deze de weg overstak. De Amerikaanse onderzoeksraad concludeerde dat de truckbestuurder geen voorrang gaf, terwijl de omgekomen Tesla-rijder te hard reed en te veel vertrouwde op de autopilot. De radar had de truck ongetwijfeld opgemerkt, maar het 'brein' van de auto had dit wellicht genegeerd. Musk gaf eerder al aan dat het systeem bepaalde, door de radar aangestraalde objecten negeert als ze eruitzien als boven de weg hangende borden. Als Tesla's daarvoor steeds in de remmen gaan, heb je uiteraard een probleem. Hierbij speelde waarschijnlijk ook het minimale dopplersignaal van de vrachtwagen een rol, waardoor de radar moeite zal hebben gehad om de truck te onderscheiden van onbelangrijk geachte, statische objecten.
Richard Wallace, de directeur van de Transportation Systems Analysis-groep binnen het Center for Automotive Research zei op basis van dit ongeluk uit 2016 dat het algoritme dan ook 'duidelijk nog wat verfijning behoeft'. Wallace ging niet zover dat hij stelde dat lidar het ongeluk had kunnen voorkomen, maar was wel duidelijk over het belang van lidar. "Het is het beste van twee werelden. Het zit tussen camera's en radar in, en kan zowel de afstand als objecten en hun vorm detecteren. De camera is een optisch systeem dat het moeilijk heeft in het donker of bij een sneeuwstorm." Wallace stelt dat Elon Musk een 'slimme man' is, maar dat uiteindelijk zal worden bewezen dat lidar nodig is. "Het voegt een mate van veerkracht en meervoudigheid toe die het oplossen van de integratie eenvoudiger maakt."
In januari 2018 was er een crash waarbij een Tesla Model S op de snelweg achter op een stilstaande brandweerwagen botste. Niemand raakte gewond. Vorig jaar voltrok een dergelijk scenario zich nog twee keer, waarbij opnieuw Tesla's op een Amerikaanse snelweg op een stilstaande brandweerwagen inreden. De bestuurders, die in geen van de ongelukken ernstig gewond raakten, gaven steevast aan dat ze dachten dat de autopilot aanstond. Ongetwijfeld trof de bestuurders ook enige blaam, maar ervan uitgaande dat de autopilot geactiveerd was, dient de vraag zich aan hoe een dergelijk geavanceerd systeem een grote rode brandweerwagen kan missen. Wired wijst daarbij naar de Engelstalige handleiding van de Model S, waarin het volgende staat: "Traffic-Aware Cruise Control kan niet alle objecten detecteren, vooral in situaties waarin je harder dan 80km/u rijdt, en zal wellicht niet remmen als een voertuig voor je de rijbaan verlaat en daarvoorbij een stilstaand of langzaamrijdend voertuig opduikt." Bij Volvo's semiautonome systeem geldt iets soortgelijks, namelijk dat de Volvo een stilstaand voertuig dat ineens opduikt, negeert. Bestuurders wordt op zo'n moment aangeraden in te grijpen.
Een dergelijke gedraging van een systeem met adaptive cruise control of een geautomatiseerde noodremfunctie is niet zo vreemd, omdat statische, niet-bewegende objecten in veel gevallen wel genegeerd moeten worden. Erik Coelingh, het hoofd van een technologieafdeling van Zenuity, een samenwerking tussen Volvo en Autoliv, zegt dat er altijd een balans moet worden getroffen tussen remmen als het niet echt nodig is en niet remmen als het wel nodig is. Hij doelt op 'valse positieven', zoals de eerder bedoelde borden die boven de weg hangen. Raj Rajkumar, die bij de Carnegie Mellon-universiteit onderzoek doet naar autonoom rijden, stelt dat de radars van Tesla 'kennelijk bedoeld zijn voor het detecteren van bewegende objecten en blijkbaar niet heel goed zijn in het detecteren van stilstaande objecten'. De vier naar voren gerichte camera's dienen als back-up voor de radar en zijn vooral bedoeld voor het lezen van verkeersborden.
Het systeem is dus waarschijnlijk afgesteld om vooral te letten op bewegende objecten, zoals andere auto's. Dat zal nogal wat levens hebben gered; het gaat ook bijna altijd goed en het is waarschijnlijk het beste compromis dat mogelijk is op basis van de technologie waarvan de autopilot gebruikmaakt. Of lidar in dit geval verschil had gemaakt, is moeilijk te zeggen. Feit is dat een gemiddeld modern lidarsysteem een beeld genereert waarop vrij goed is te zien of iets een verkeersbord boven de weg is of een brandweerwagen. Een lidar zou ook de truck van het ongeluk in Florida hebben gezien. Daarmee ben je er echter nog niet, want het systeem moet dat wel adequaat interpreteren, waarbij het lidarsysteem ook enige tijd nodig zou hebben gehad om te bepalen hoe en met welke snelheid de truck precies bewoog. Camera's moeten hiervoor volgens Musk uiteindelijk ook uitkomst bieden, maar zover is de technologie nog niet. Uiteindelijk zal het ook helpen als alle voertuigen via 5g met elkaar communiceren en zodoende hun onderlinge locaties kennen, maar ook dat is toekomstmuziek.
Tot slot: een onvolwassen markt
De markt voor lidars voor autonoom rijdende auto's is nog volop in ontwikkeling en het is nog lang niet duidelijk welk type uiteindelijk zal bovendrijven. Wellicht dat er in de toekomst ook niet slechts één type lidar als winnaar uit de bus komt, omdat ze veelal hun eigen specifieke eigenschappen hebben. Veel autofabrikanten en bedrijven die bezig zijn met autonome autosystemen, gaan ook hun eigen weg, waarbij Tesla duidelijk het eigenzinnigst is. Elk bedrijf gebruikt zijn eigen set-up van lidars, radars, camera's en soms andere sensoren.
Daar komt bij dat nieuwe ontwikkelingen, zoals cwfm-lidars, ongetwijfeld ook gaan oprukken. Cruise, het dochterbedrijf van General Motors dat achter de Cruise AV-auto zit, heeft in oktober 2017 het bedrijf Strobe overgenomen, waarschijnlijk vanwege de vorderingen die dit bedrijf op het vlak van cwfm-lidars heeft gemaakt. Bovendien zijn er wetenschappelijke ontwikkelingen die wellicht in de toekomst hun weg naar lidars zullen vinden, zoals de Eindhovense vinding van een laser die in alle richtingen schijnt. Daarmee zou de noodzaak van roterende spiegels, lasers en de behoefte aan meer dan één laser kunnen wegvallen.
Een vroeg prototype van een lidar van Strobe
Solidstatelidars lijken goede papieren te hebben om dominant te worden, maar een medeoprichter van Quanergy, Angus Pacala, werkt met zijn bedrijf Ouster juist aan traditionelere lidars met ronddraaiende lasers. Hij stelt dat die nog altijd het grote voordeel hebben dat een enkele laser meteen een gezichtsveld van 360 graden geeft, terwijl solidstatelidars met een enkele laser doorgaans niet verder komen dan 120 graden.
Bovendien wijst hij erop dat bewegende, ronddraaiende lasers op basis van veiligheidsregels voor het beschermen van het menselijk oog een hoger vermogen mogen hebben dan vaste lasers. Hierbij geldt namelijk de maatstaf dat ze geen schade mogen aanrichten als iemand er met zijn oog gedurende enkele seconden recht in kijkt, zonder te knipperen. Bij een vaste laser kan daarbij honderd procent van het laserlicht in het oog komen, terwijl bij roterende systemen het laserlicht slechts een fractie van een seconde in één richting straalt. Dat maakt een hoger vermogen mogelijk, wat het eenvoudiger maakt om reflecties te detecteren. De draaimolens lijken hun langste tijd dus nog niet te hebben gehad.
Een muziekvideo van Radiohead waarin lidartechnologie is gebruikt
Een van de belangrijkste ontwikkelingen bij lidars is niet alleen het zo precies en capabel mogelijk maken van de systemen, maar ze vooral ook zo goedkoop mogelijk weten te produceren. De Velodyne HDL-64E, die een bereik van 120 meter heeft en waarbij elke puls een afwijking van 0,4 graden ten opzichte van de volgende puls heeft, schijnt tussen de 75.000 en 100.000 dollar te kosten. Dat is nog wel op te brengen voor kapitaalkrachtige, commerciële partijen zoals Alphabet, dat deze sensor gebruikte bij een vroeg prototype in de vorm van een zelfrijdende Toyota Prius. Uiteindelijk prijs je jezelf daarmee echter uit de markt. Wat de nieuwere Velodyne VLS-128 met zijn 128 lasers gaat kosten, is onbekend. De goedkopere VLP-16 kost naar verluidt 4000 dollar. Ouster heeft varianten van 24.000, 12.000 en 3500 dollar. Quanergy biedt zijn solidstatelidar genaamd S3 echter aan voor 250 dollar per stuk, mits het ding in grote volumes wordt geproduceerd. En dan moet er nog een goedkopere versie aankomen. De prijs gaat onherroepelijk flink naar beneden als er alleen nog chips nodig zijn om laserlicht te produceren.
Als lidars uiteindelijk relatief goedkoop zijn te produceren, ook in kleinere volumes dan 100.000, worden ze pas echt interessant voor particuliere, zelfrijdende auto's. Dan moet de technologie voor zelfrijdende auto's ook nog verder worden ontwikkeld; lidars of soortgelijke sensoren zijn daar slechts een onderdeel van. We moeten dus nog even geduld hebben voordat onze heilige, al dan niet gedeelde koe wordt voorzien van een klein laserkanon met een extreem hoge vuursnelheid waar verder niemand iets van merkt.
Ik schaar me volledig achter het standpunt van Elon Musk in deze.
Als het doel is om een autonoom voertuig te maken dat in eerste instantie even goed presteert als een mens, dan is een lidar absoluut geen vereiste. Een mens rijdt ook niet op zijn 6e zintuig, maar gebruikt voornamelijk zijn ogen. Een mens heeft ook last van slechte weersomstandigheden en laagstaande zon.
Die (steeds terugkerende) exemplarische ongevallen van een Tesla zijn het bewijs dat er nog werk aan de winkel is voor het verbeteren van de software, *de verwerking van* het camera beeld. Een LIDAR had in het geval van de brandweerauto precies dezelfde informatie gehad (een stilstaand object dat achter een bewegend object opdoemt).
Een systeem op basis van passieve sensoren (camera's) heeft nog veel meer potentie dan wat er nu beschikbaar is. De investering in LIDAR techniek is super handig voor toepassing in specifieke situaties (voornamelijk statische) maar lost op dit moment vooral het gat in signaalverwerking op (rekenkracht) door een schoner beeld af te leveren dan een verzameling camera's. Daarnaast zullen er hele andere problemen opdoemen als er daadwerkelijk vanuit alle hoeken LIDAR pulsen over en weer vliegen..
[Reactie gewijzigd door oZy op 23 juli 2024 02:41]
Citaat uit de transcript van de Tesla 2018 Q4 earnings call van gisteren:
Gene Munster:
Question I have is related to Waymo and the autonomous driving opportunity. Morgan Stanley recently valued Waymo at $175 billion. And my question is, what do they have that you don't have? And separately - so what do they have that you don't have?
(...)
Elon Musk:
(...)
So it's extremely important. We feel confident about our technical strategy, and I think we have an advantage that no one else has, which is, that we have, at this point, somewhere in the order of 300,000 vehicles on the road, with a 360-degree camera sensor suite, radar, ultrasonics, always connected uploads, especially video clips with the customer [submission] [ph] when there is intervention. So effectively, we have a massive, massive training fleet.
Our - the amount of training that we have - if you add everyone else up combined, they're probably 5%, I'm being generous, of the miles that Tesla has. And this difference is increasing. A year from now, we'll probably go - certainly from 18 months from now, we'll probably have 1 million vehicles on the road with - and every time the customers drive the car, they're training the systems to be better. I'm just not sure how anyone competes with that.
[Reactie gewijzigd door matroosoft op 23 juli 2024 02:41]
Marketing is Elon musk erg goed in om zijn investeerders een stijve te blijven houden. Maar concurrentie is er zo en veegt dan Tesla compleet weg. Maar goed dat zijn andere scenario's
Toch is het idee van Musk niet zo slecht.
Een beeldsensor bestaat zelf al uit duizenden individuele censoren (pixels). Met 8 camera's verzamel je meer data dan met lidar mogelijk is. Door beelden te combineren kan je ook diepte zien (net als wij met onze ogen). Eigenlijk heb je zo alle informatie die je nodig hebt om te kunnen rijden. Wij moeten het met maar twee ogen doen.
Slechte weersomstandigheden kunnen het zicht wel behoorlijk beperken. Voor camera's kan je de verlichting zo afstemmen dat ze nog wel goed zicht hebben. Duisternis en regen zijn hier wel mee op te lossen. Mist en sneeuw worden nog wel een probleem. Daar zal een lidar wel uitkomst bieden.
Wanneer tientallen auto's met elk honderden lidar lichtstraaltjes bij een drukke kruising staan, krijg je vermoedelijk toch wel problemen met de verschillende systemen die met elkaar gaan interfereren. Dat moet ook weer opgelost worden, terwijl camera's dat probleem helemaal niet hebben.
Een systeem op basis van lidar is vele malen duurder dan een systeem dat is gebaseerd is op een aantal camera's, eventueel met een zeer beperkt aantal lidars. Als het om betaalbaarheid gaat zit Musk dus op het goede spoor.
Ik blijf erbij, level 5 autonoom rijden, wil je niet zonder LIDAR.
Het is leuk voor autopilot zoals het nu staat, maar dat is verre van level 5 autonoom.
Tesla's autopilot is op dit moment level 2 autonoom rijden en heeft potentie om level 3 te worden in de toekomst.
Bij Level 5 wil je gewoon zo veel mogelijk informatie. In het donker kan LIDAR zien welke kant een gezicht van een voetganger op staat, waar het voor radar één vlek is...
Het is veel gedetaileerder en met meer informatie over de omgevinf kun je veel betere afwegingen maken.
Ik zie ook geen toekomst voor LIDAR alleen, Echt zowel RADAR als LIDAR.
Het probleem is dat LIDAR nog erg duur is en het is logisch dat Musk niet gaat zeggen dat het eigenlijk wel nodig is, maar nog te duur om te implmenteren.
Wacht maar af, over 5-10 jaar heeft ook Tesla LIDAR aan boord!
Dat ben ik oog volledig met je eens. Voor systemen op basis van lidar alleen is lidar gewoon veel te duur. Zelfs als de prijzen tot een kwart dalen.
Camerabeelden met slechts een paar statische lidars en/of radar is veel goedkoper en kan in potentie net zo goed presteren. Tesla bewijst dat je met camera's alleen al heel ver kan komen.
Tuurlijk zijn ze heel ver, maar tessen level 2 autonoom (autopilot) en lever 5 autonoom, zitten nog wel wat stappen te nemen.
Level 3 zie ik autopilot ook wel behalen.
Maar voor level 5, volledig autonoom in alle situaties (ook zonder bekende kaarten en eerdere gebruiksdata van andere weggebruikers), is LIDAR echt wel gewenst, zo niet vereist!
Ik zou ook een combinatie met thermisch infrarood om objecten nog beter te herkennen.
Het zal uiteindelijk een combinatie zijn van camera + thermisch infrarood camera (nu ook nog te duur) Lidar, Radar.
Maar grappig is eigenlijk als je dit artikel lees zijn we nog wel jaren verwijderd van betaalbare en betrouwbare level 5 systemen.
Klopt, maar als Musk dat zou zeggen, doet dat veel afbraak aan de autopilot.
Hij kan nu niet anders dan zeggen dat dit meer dan genoeg is. LIDAR inbouwen is veel te duur.
Zijn strategie: nu mensen "verliefd" laten worden op Autoplot en later upgraden. Prima strategie overigens...
Maar dat er op Tweakers zo veel mensen achter hem aanlopen verbaast mij wel.
Klopt, maar als Musk dat zou zeggen, doet dat veel afbraak aan de autopilot.
Hij kan nu niet anders dan zeggen dat dit meer dan genoeg is. LIDAR inbouwen is veel te duur.
Zijn strategie: nu mensen "verliefd" laten worden op Autoplot en later upgraden. Prima strategie overigens...
Maar dat er op Tweakers zo veel mensen achter hem aanlopen verbaast mij wel.
Later upgraden naar lidar zal niet zo eenvoudig worden. Het zal dus zeker nog tijdje duren vordat level 5 er is, voor de massa nog langer want dan moet het ook betaalbaar zijn in een auto van 20.000 euro.
Dat er zo veel mensen achter hem aanlopen, mij verbaasd het totaal niet. Tweaker sis ook maar een doorsnee van de IT samenleving. Veel mensen hebben behoefte aan een voorbeeld, klampen zich er om wat voor een manier dan ook aan vast.
Maar best knap dat Musk dat als een soort sekteleider voor elkaar krijgt om mensen blind achter hem aan te laten lopen.
Ergens vind ik het wel scary dat de lasers toch schade kunnen veroorzaken.
Het kan geen schade aanbrengen aan mensen is de bewering. Maar wat gebeurd er als die mens naar het zuiden van frankrijk rijd en dus 1000KM tegenliggend verkeer (radars) tegenkomt? Dan zal er toch wel schade meetbaar zijn vermoed ik, want je bent er een hele dag aan blootgesteld.
En wat gebeurd er met de natuur? Hebben planten of dieren wel last/schade van die radars?
[Reactie gewijzigd door sebastienbo op 23 juli 2024 02:41]
In de auto zal je niet zoveel last hebben van een lidar. Dat licht wordt wel tegengehouden door je ruiten. Voor de natuur kan het best eens lastig of schadelijk zijn. Beesten zien andere lichtfrequenties dan wij
en kunnen dus anders reageren op licht.
Aan de andere kant, als een lidar nu al effect heeft op een camera, wat gebeurt er dan met de camera's van een Tesla als die even in het licht van een lidar staat?
Kortom, je roert een punt aan waar nog niet aan gedacht is!
Aan de andere kant, als een lidar nu al effect heeft op een camera, wat gebeurt er dan met de camera's van een Tesla als die even in het licht van een lidar staat?
Kortom, je roert een punt aan waar nog niet aan gedacht is!
Ga er van uit dat je op een camera een filter kan plaatsen die allen boven een bepaald bereik aan licht niet doorlaat.
Neemt niet weg dat het zeker een punt is, vlek op je camera, nog een vlek en je hebt een probleem.
Marketing? Heb jij enig idee hoe ver Tesla voor loopt met deze markt? Misschien moet je even een kijkje nemen naar de cijfers in Amerika. Model 3 is de best verkopende auto van het segment, en dan niet alleen in cijfers individueel, de Model 3 verkoopt meer dan alle modellen uit dat segment bij elkaar doen.
Laat ik jou even herinneren dat auto's uit een goedkoper segment absoluut geen enkele technologie hebben wat ook maar in de buurt komt van wat Auto Pilot nu kan, en laten we niet vergeten dat de Model 3 net een week gelanceerd is in europa en straks hier ook alle recoors verbreekt.
Wat jij enorm onderschat is dat zometeen wij minstens net zo veel Tesla's hier in NL en uiteindelijk in veel meer markten hebben rijden als wij BMW's, Volkswagens en Mercedessen hebben. Tesla loopt vrijwel 10 jaar voor op de markt van morgen. Dat is gewoon een feit die overal constant bevestigd wordt.
Automerken die nu met elektrische auto's komen hebben nog minstens 1 tot 2 jaar nodig (Porsche Mission E(paycan)) voor ze een auto hebben uitgebracht laat staan het feit dat ze nu al achterlopen op technologie, prestatie, veiligheid en niet te vergeten het supercharge netwerk wat al jaren bestaat bij Tesla. De goedkopere Model 3 en straks Model Y die er nog bij komt is al velen malen beter en goedkoper dan wat nog in concept fase is bij concurrentie. Ik neem dit niet licht als ik zeg dat concurrentie 10 jaar achter loopt. Kijk alleen al naar het Supercharge netwerk waar versie 3 over enkele maanden voor komt die nog eens 2x zo hard zal gaan als het al deed. Kijk naar de technologie en de vooruitgang van Autopilot na elke update die naar de hele fleet in een week uitrold. Kijk naar de performance tussen de huidige modellen en concurrerende modellen die nog jaren niet uit zijn. Kijk naar de veiligheids scores.
Concurrentie is al bijna compleet weg geveegd en ze lopen zo erg achter dat ze geen idee hebben wat ze doen. Mercedes niet, BMW niet, Audi niet, Volkswagen niet. Al weten ze dondersgoed dat elektrische de toekomst is lopen ze nu al jaren achter op waar Tesla de afgelopen 10 jaar naar heeft geïnvesteerd.
Alleen de plannen en rechten om op locaties te mogen bouwen om te laden zoals superchargen duurt jaren voor het wordt goedgekeurd. Tesla heeft dit al heel lang in werking concurrentie is nog in een concept fase waarbij ze in de auto beurs praten over mogelijkheden die er nog niet zijn.
Vind het tevens grappig dat je het woord marketing gebruikt terwijl Tesla het enige automerk is die nooit geld uitgeeft aan Marketing. Is er ook maar 1 Tesla reclame op TV geweest of zelfs online? Zie jij ergens ook maar een advertentie over Tesla? Als je er eentje weet te vinden mag je hem naar mij linken.
[Reactie gewijzigd door Nimac91 op 23 juli 2024 02:41]
Wat Tesla lijkt te vergeten is kleine en goedkope elektrische auto's. Model 3 is nog steeds een grote auto en de volgende tesla wordt een crossover.
Hier spelen de onder andere Europese fabrikanten een grotere rol en ik verwacht daarom dat Tesla vooral duurdere segment bedient en de midedenklasse en vooral het goedkope segment gaat missen.
Dit is niet erg, vergelijk het met BMW en Mercedes, die hetzelfde in het verleden hadden. Het dure segment.
Dit is niet vergeten maar onderdeel van het Masterplan van Musk. Het staat letterlijk op de website van Tesla (inclusief deel twee): https://www.tesla.com/nl_NL/blog/master-plan-part-deux The first master plan that I wrote 10 years ago is now in the final stages of completion. It wasn't all that complicated and basically consisted of:
Create a low volume car, which would necessarily be expensive
Use that money to develop a medium volume car at a lower price
Use that money to create an affordable, high volume car
And...
Provide solar power. No kidding, this has literally been on our website for 10 years.
Ze zitten momenteel vol in de Model 3 maar zijn nog lang niet op het niveau van productie dat nodig is om de goedkoopste variant hiervan op de markt te zetten. Dit kost tijd. Hierna komt de model Y en daarna? Wie weet maar reken er maar op dat alle automarkt segmenten op de kaart staan.
De enige redenen om om geen kleine auto te maken zijn kosten, capaciteit en winst. Aan de eerste twee wordt hard gewerkt en de laatste is logisch.
Heb je erin gezeten? Ik wel en het komt dichter bij mijn Focus, dan bij mijn V60, laat staan Audi of BMW...
Toch overweeg ik de Model 3 omwille van de bijtelling, maar met de afwerking moet ik wat zaken door de vingers zien, maar ook kwa ruimte. Mijn V60 heeft meer binnenruimte dan de Model 3. De V60 zit lekkerder... Tja, al met al is de afweging louter financieel!
Het gaat hier ook exclussief om de Long range uitvoering gezien de short range nog niet bestaat. De short range variant zal wellicht worden vergeleken in een lager segment maar zal ook zeker veel verkopen. De midrange Model 3 is inmiddels ook uit daar zijn nog niet veel cijfers over bekend.
Offtopic: De afwerking van de modellen is in de afgelopen tijd extreem verbeterd. Mijn Model S uit dec 2017 had in principe geen issues in de afwerking daarmee doel ik op de gap tussen de bumper, motorkap etc. Model 3 is wel iets meer in massaproductie maar van wat ik begrijp is er enorme verbetering geweest. Toch wil ik zeggen dat de auto zo heerlijk rijd en werkt dat dit vrijwel door alle eigenaren snel vergeven wordt. Als het echt een extreem probleem is willen ze het meestal wel voor je oplossen. Ik ben ontzettend blij met mijn Model S en ben enigzins jaloers op de Model 3 eigenaren. Ze krijgen dezelfde features soms zelfs beter voor de helft van de prijs en het is een ontzettend mooie auto. Ook CCS charging wat nog sneller werkt dan Superchargen is alleen mogelijk bij de Model 3 en niet S wat een extra voordeel is. Goeie keus zeker met de bijtelling, millieu investerings aftrek en wegenbelasting die je bespaard. Superchargen kost ook minder dan laden op straat vaak tenzij je je eigen garage hebt thuis zal dit uiteraard nog goedkoper zijn.
[Reactie gewijzigd door Nimac91 op 23 juli 2024 02:41]
Ik heb een paar weken geleden bij de dealer in een Model 3 gezeten, daar baseer ik mijn ervaringen op. Die vind ik dichter bij de Focus (overall) zitten dan een 3 serie of A4.
Het probleem van de Model 3 is dat het gewoon een auto is die op het ene vlak voorbij de luxe auto's, maar op sommige vlakken is het gewoon een Kia Picanto... Het zijn er maar enkele, maar dat doet wel heel erg af op de kwaliteitsbeleving...
Zo klinkt het idd, maar zo positief als ik ben in mijn stukje ben ik ook extreem kritische op andere punten. Ik ben gewoon altijd up to date met technologie over Tesla maar ook de concurrerende merken. Als het puur gaat om informatie krijg ik dat er makkelijk uit en komt het over alsof ik de auto presenteer. Maar als het gaat om details zijn er zeker dingen waar ik kritische over ben bij Tesla. In veel situaties wegen de positieve dingen aan het merk meer dan de negatieve.
Kosten voor onderhoud zijn extreem hoog wanneer je daar last van hebt. Kwaliteits eisen bij Tesla liggen lager als bij onze Duitse buren waardoor afwerking en interieur daar vaak ten kosten van is. Communicatie binnen Tesla naar klanten is vreselijk! Medewerkers zijn ontzettend vriendelijk en hulpzaam maar emails worden vaker niet beantwoord of follow ups raken verzwikt in de velen velen aanvragen. Ze kunnen de groei nauwelijks aan waardoor een simpele fix soms maanden kan duren. Dat is iets waar alle Tesla eigenaren mee moeten leren dealen. Wil je een nieuwe bumper na schade kan het zo 4 tot 5 maanden duren voor het onderdeel er klaar ligt. Is je auto total loss daarintegen krijg je wel gelijk een leen auto van Tesla zolang deze gerepareerd wordt(kan ook een fossiele brandstof auto zijn als er geen Tesla's beschikbaar zijn).
Time ETA's van Elon Musk en deadlines maken het zwaarder voor het bedrijf dan nodig. De deadlines die publiek gemaakt worden worden vaker niet gehaald waardoor mensen teleurgesteld raken en alles wordt uitgesteld.
Supercharge locaties beginnen redelijk vol te raken en dat terwijl de Model 3 nog maar net uitkomt in NL.
Ik denk dat je eerst even wat moet inlezen over wat autopilot precies is gezien op basis van je uitspraken je geen idee hebt. Uiteraard heeft Musk niet "alles" zelf uitgevonden. Überhaupt "vindt" Musk niet wat uit, hij heeft daar mensen voor. Hij heeft ook nooit beweerd dat "hij" iets uitvindt.
Man man je praat alsof de auto van Tesla de nieuwe auto is wat totaal niet is.
Je hebt je er ook weer duidelijk niet over ingelezen. De model is een evolutie van de vorige modellen en bijna ieder onderdeel is zeer vooruitstrevend. Het is een ongekend aerodynamische auto (voor lange bereikbaarheid) De motoren zijn enorm vooruitstrevend (soms nog steeds een raadsel voor deskundigen). Hetzelfde geld voor de aandrijving. En laten we het maar niet over het belangrijkste onderdeel hebben: de batterijen. Wat dacht je trouwens van het dashboard (dat er niet meer is) of het ventilatiesysteem? Ik begin niet eens over de software, dat kun je in dit artikel wel lezen.
Dit alles is nu beschikbaar en we hebben geen idee waar ze allemaal alweer mee bezig zijn.
Dat het nu al revolutionair is, daar is iedereen het wel over eens. Behalve jij...
Ik zie je onderbouwing waarom de M3 niet revolutionair is graag tegemoet.
[Reactie gewijzigd door Verwijderd op 23 juli 2024 02:41]
1: Je spreekt jezelf tegen in dezelfde zin
De Model 3 heeft een aerodynamische factor van 0.21 Cd. Dit maakt de auto een van de aerodynamische productie auto's ooit gemaakt. Misschien wel de aerodynamische ooit.
2. Ik snap niet wat je hier wilt zeggen. Ik geef je een bron die aangeeft dat het ontwerp van de elektromotor bijzonder en revolutionair is maar je reageert niet eens inhoudelijk?
3. Ik herken een flame, sorry dat ik inhoudelijk heb gereageerd. Ik dacht dat je een discussie voerde maar dit is niet het geval.
Ik vind Bjorn Nyland's zijn tests altijd wel leuk, maar de Ioniq kwam daar toch echt beter uit de test dan de Model 3... Niet helemaal, de rwd model 3 deed het beter, maar die is niet (meer) leverbaar... En dat scheelde niets...
> en hebben nu al een langere distance, en sneller laden etc dan een TESLA.
Nou daar wil ik wel een voorbeeldje van zien, want wat misschien een promo-prototype ergens in een speciale setting kan is niet een weergave voor wat je nu krijgt als je een auto bestelt. Zover mij bekend is er geen auto in productie die een hogere range en efficientie haalt dan Tesla. Er zal heus wel wat concurrentie komen maar die is er nog niet, noch weet ik niet hoe je zeker kan weten dat die Tesla in gaan halen.
Noem het marketing, maar vooralsnog is het geen autofabrikant gelukt zo'n vloot met auto's te maken die data voor je vergaderd en je neurale netwerk traint.
Als dit marketing geblaat is, wat is het dan niet?
Je kan je beter afvragen waarom de huidige fabrikanten het niet zo interesseren.
Voor hun is EV nog niet de inkomstenbron. Daarvoor hebben ze genoeg genorg jaren met de diesel en benzine auto's. Geloofr als de fabrikanten er geld in zagen dat ze op de eerste rang zaten. Elon musk is goed in het praten van dingen . Maar al zijn projecten die hij heeft opgericht hebben nooit een succes gehad. Dus waarom zou het nu wel anders zijn.
Maar goed ik ken zijn achtergrond en heb zijn biografie al zo vaak gelezen en alles er omheen. marketing is het gewoon
Enige wat hem anders en apart maakt is. Hij denkt drastisch waardoor er ander ideeen van komen. En dus zo nieuwr toffe ideeën komen.
[Reactie gewijzigd door theduke1989 op 23 juli 2024 02:41]
Maar al zijn projecten die hij heeft opgericht hebben nooit een succes gehad.
Waar haal je dit vandaan?
Ik gebruik al jaren paypal, dus ik zou niet zeggen dat dat geen succes was.
En volgens mijn is het SpaceX als enige gelukt alle onderdelen van een raket weer te laten landen, en 300k tesla's op de weg is ook een behoorlijke prestatie.
Dat zijn projecten in het algemeen waar hij bekend om sta.
Maar al die projecten hadden nooit winst gedraaid check de biografie hij verteld zelf er over. Nu weet ik over spsceX njet veel maar kan me herinneren dat SpaceX ook niet echt soepel draaide ... Maar goed dat is een ander verhaal om over te discussiëren.
Precies de redenering die ik ook volgde, mensen hebben ook alleen maar ogen en dat werkt prima. (Ongelukken gebeuren, dat klopt, ik kan zelf ook elke dag wel minimaal 1 "ongeluk" krijgen als ik niet goed anticipeer op situaties of acties van andere verkeersdeelnemers, zoals geen richting aangeven en fietsers van links.)
Software wordt ook alleen maar beter.
Dat er ooit radar in auto's is gekomen, heeft puur te maken met rekenkracht die ontbrak toen de eerste auto's adaptive cruise control kregen. Bijna 30 jaar geleden, Mercedes als eerste premium 20 jaar geleden. Neem de ontwikkelingstijd mee, er was gewoon geen andere optie. (De tijd van Windows 95, 400MB harddisks, 14k modems) Radar vervangen door lidar heft sommige beperkingen van de radar op, maar is in principe niet (meer) nodig.
Kan Lidar trouwens ook gebruik maken van weerkaatsen op de weg, zodat je onder een andere auto door kunt kijken? Radar kan dat wel.
In theorie kan lidar dat wel, maar de demo beelden die nu gegeven worden wordt dat niet gedaan.
Uiteindelijk worden de verschillende sensoren bij elkaar gevoegd om een wereldbeeld te maken. Dat is niet zo simpel als het klinkt, want er zitten fouten in se sensoren,
-lichtreflrecties, objecten met weinig contrast
-Beeldherkenning (lidar onderscheid maken tussen overstekende fietser en verkeerbord is voor waymo ook moeilijk op dit moment?)
-radar imperfectes, objecten die radar niet (goed) reflecteren.
Sorry, maar je gaat toch ook niet zonder bril rijden?
Met je ogen zie je welke kant een voetganger op kijkt en dus aannemelijk is welke kant hij op zal gaan lopen.
Radar kan dat onmogelijk detecteren. Lidar wel!
Level 5 autonoom rijden is af te raden zonder LIDAR.
Je hebt gewoon beide nodig, LIDAR en RADAR....
Time-of-flight lidar klinkt leuk voor een enkele auto. Maar wat als zo direct iedere auto er mee is uitgerust? De hoeveelheid interferentie lijkt mij zo gigantisch hoog dat je hele systeem onbruikbaar wordt. Dan moet je wel zo'n CWFM systeem gebruiken. Of zoals Musk inzetten op passieve systemen.
Wat dat betreft zie ik dan ook meer heil in zo veel mogelijk camera's te gebruiken en het door ontwikkelen van de beeldherkenningsalgoritmen. Maar dan niet alleen zichtbaar licht camera's maar ook IR en UV.
Ik moet zeggen dat Musk vaak dingen roept die wel eens de plank mist, maar hier moet ik hem hier toch echt gelijk in geven. Er zijn genoeg algoritmes en AI toepassingen te verzinnen met slimme camera's om dit soort problemen te voorkomen, waarbij men geen Lidar hoeft toe te passen.
Er wordt wel vermeld dat de Lidar systemen niet schadelijk zijn voor het menselijk oog, maar wat gebeurt er als we massaal worden blootgesteld aan het systeem. Wanneer elke auto ermee uitgerust wordt kan ik mij niet voorstellen dat dit geen gezondheidsrisico's met zich mee neemt. Maar dat is waarschijnlijk pas naar tientallen jaren en dan is het geld al verdient. Afgezien van de storingen of beschadigingen op andere elektronische apparatuur.
Gezien de mogelijkheden begrijp ik persoonlijk het nut van volledig autonome auto's echt niet en ik zie dit ook totaal niet als een toekomstbestendige oplossing. De grootste problemen zijn in de buurt rond en in steden. Er zijn genoeg betere oplossingen te verzinnen naar mijn mening, probleem is echter dat je de hele infrastructuur van de stad moet veranderen, maar dit is wel veel toekomst bestendiger.
Autonome taxi's zijn ook een leuk idee, maar wat gaan al die taxichauffeurs dan doen, inderdaad die hebben geen baan en leven van onze belastingcenten. Worden de taxiritten er goedkoper door? Waarschijnlijk ook niet. Automatisering is in bepaalde mate nodig en heel handig, maar men moet ook niet te ver gaan.
Veiligheid is nooit gegarandeerd met wat voor elektronisch systeem er ook gewerkt wordt. Er zijn allemaal wel weer veiligheden in te bouwen, maar het moet ook nog betaalbaar blijven. Wat mij betreft is dit een ontwikkeling die ik hoop nooit op grote schaal in auto's te vinden, maar dat is mijn mening. Misschien toch maar eens Tesla aandelen aanschaffen
Wanneer elke auto ermee uitgerust wordt kan ik mij niet voorstellen dat dit geen gezondheidsrisico's met zich mee neemt.
Dit is toch echt anti-vaxxer (of anti-4G) logica: Ik begrijp het niet, en ondanks alle onderzoeken naar schadelijkheid van infrarood straling die laten zien dat Lidar veilig is, geloof ik die toch niet en ga ik ervan uit dat het schadelijk is. Welke gezondheidsrisicos zijn in hemelsnaam pas na tientallen jaren optreden van een infrarood bundel? Als er gezondheidsrisicos zouden zijn, dan is dat oogschade. Dat kost geen tientallen jaren voordat dat gebeurd.
Gezien de mogelijkheden begrijp ik persoonlijk het nut van volledig autonome auto's echt niet en ik zie dit ook totaal niet als een toekomstbestendige oplossing.
Ik kan prima me voorstellen dat liefhebbers van autorijden liever zelf rijden (vraag me niet waarom iemand graag zelf in de file wil rijden, maar ieder zijn ding). Alleen ik kan me dus absoluut niet voorstellen dat iemand het nut van volledig autonome auto's niet begrijpt. Wat dacht je van mij van A naar B brengen terwijl ik in die tijd zinvolle dingen met mijn leven kan doen? Of hetzelfde als ik niet kan rijden, om wat voor reden dan ook?
Veiligheid is nooit gegarandeerd met wat voor elektronisch systeem er ook gewerkt wordt.
En met een mens achter het stuur wel wil je zeggen ?. Natuurlijk, er zullen ongelukken blijven gebeuren, maar een elektronisch systeem kan zeker weten het veel beter doen als de gemiddelde mens.
Lidars zijn geclassificeerd op classen die bepalen of ze wel of niet schadelijk zijn voor mensen.
Met een class 1 laser(dus veilig) kom je nauwelijks aan de 4 meter met de huidige technieken. Dat is dus niet genoeg.
En Class 2 is gelijk schadelijk in bepaalde gevallen. Een paar auto's die Class 2 gebruiken is nog wel te doen, maar als elke auto het heeft dan word het net een disco.
Dit is geen "anti-vaxxer" logica, dit zijn feiten. https://en.wikipedia.org/wiki/Laser_safety
[Reactie gewijzigd door Verwijderd op 23 juli 2024 02:41]
Klasse twee lasers zijn gewoon veilig bij normaal gebruik. Dus dat valt wel mee. En hoewel er dan wel veel lidars zijn, kijkt elke lidar naar een ander stukje, het is niet alsof er twintig lidars tegelijk jouw oog scannen.
Dit is toch echt anti-vaxxer (of anti-4G) logica: Ik begrijp het niet, en ondanks alle onderzoeken naar schadelijkheid van infrarood straling die laten zien dat Lidar veilig is, geloof ik die toch niet en ga ik ervan uit dat het schadelijk is. Welke gezondheidsrisicos zijn in hemelsnaam pas na tientallen jaren optreden van een infrarood bundel? Als er gezondheidsrisicos zouden zijn, dan is dat oogschade. Dat kost geen tientallen jaren voordat dat gebeurd.
Wat maakt het uit hoe lang de oogschade zou duren, als er een mogelijkheid bestaat dan is het toch al slecht? Het gaat mij niet om 1 of 2 auto's die er met zo'n systeem rond rijden, maar wel als er duizenden rond rijden. Daarnaast zullen systemen een bepaalde sterkte moeten hebben om effectief te werken. Als er oplossingen zijn waar er totaal geen gezondheidsrisico is dan kies ik toch liever daarvoor.
[...]
Ik kan prima me voorstellen dat liefhebbers van autorijden liever zelf rijden (vraag me niet waarom iemand graag zelf in de file wil rijden, maar ieder zijn ding). Alleen ik kan me dus absoluut niet voorstellen dat iemand het nut van volledig autonome auto's niet begrijpt. Wat dacht je van mij van A naar B brengen terwijl ik in die tijd zinvolle dingen met mijn leven kan doen? Of hetzelfde als ik niet kan rijden, om wat voor reden dan ook?
Welke zinvolle dingen denk jij te moeten doen dan terwijl je gereden wordt door je auto? Je mail of whatsapp berichtjes bekijken of kijken of er nog interessante social media posts zijn? Het bekijken van het nieuws die de hele dag door herhaald wordt? Lekker een avond doorhalen in het café en jezelf door je eigen auto laten terugrijden?
Natuurlijk kan ik wel bedenken wat voor geweldige dingen mensen kunnen doen in hun drukke leven tijdens de autorit. Gezellig met je vrouw of vriendin kletsen of andere gezellige dingen doen. Laat ze zorgen dat de ramen ook verduisterd kunnen worden en je kunt het helemaal gezellig maken
[...]
En met een mens achter het stuur wel wil je zeggen ?. Natuurlijk, er zullen ongelukken blijven gebeuren, maar een elektronisch systeem kan zeker weten het veel beter doen als de gemiddelde mens.
Je hebt naast een volledig autonoom systeem ook genoeg mogelijkheden voor hulpmiddelen om de auto veiliger te maken. Ik ben niet tegen technologische vooruitgang, maar we moeten niet doorschieten. Autofabrikanten kunnen nog niet eens een goed draadloos sleutelsysteem verzinnen, dus nee ik heb er weinig vertrouwen in dat het met volledig autonome auto's wel goed komt.
Mooi om te zien hoe je begint met 'welke zinvolle dingen denk jij te moeten doen..." en in hetzelfde stuk positief eindigt met allerlei mogelijkheden. Reageren op mail/whatsapp en dergelijk kan gewoon volledig onder werk vallen wat dus efficiënter tijdverdrijf is.
Ter aanvulling - echt toekomst denken. Een auto staat 98% van de tijd stil. Nu heb ik een auto en mijn vrouw ook. Ik vertrek om 7.00 uur naar mijn werk, en kom daar om 8.00 aan. Mijn vrouw vertrekt om 9.00 uur.
Als mijn auto gewoon om 8.00 uur terugrijd kan mijn vrouw in een heerlijke warme auto instappen om 9.00 uur en wordt naar haar werk gebracht. Wanneer wij aan het werk gaan rijd onze auto even naar de Albert Heijn om de bestelde boodschappen op te halen waar de meneer van het pickup center het netjes in de kofferbak zet.
Hij neemt meteen ook de boodschappen voor het plaatselijke verzorgingshuis mee omdat ik dat zo heb afgesproken, brengt ze daar op het afgesproken tijdstip langs en dan vervolgd de auto zijn weg naar mijn werk. Wanneer ik om 17.00 uur stop stap ik in en op weg naar huis rijden we langs het werk van mijn vrouw. Samen zijn we dan thuis en ruimen we de boodschappen op. De week erop hebben we een weekendje Barcelona op de planning staan; we vertrekken donderdagavond, zetten de stoel naar achter en komen vrijdagochtend fit daar aan. Heb er zin in.
Nu moet ik stoppen met schrijven want de buurman komt de auto halen, die werkt nachtdiensten, dus we hebben geld bij elkaar gelegd zodat we een wat ruimere auto konden kopen.
Ja er zijn tal van mogelijkheden te verzinnen, maar of deze zinvol zijn. En die mail/whatsapp berichten zijn leuk, maar denk je dat je baas zegt reken de tijd die je onderweg bent maar als werkuren?
Nog efficiënter zou zijn om dan thuis te gaan werken, dan belast je het milieu in ieder geval ook niet.
Ik heb het niet direct over werkuren (voor de baas). Maar naast het feit dat er werk verzet kan worden tijdens een rit of nog een tal van andere ontspanning en/of inspanningen, is het ook nog eens verschillend per persoon of die tijd op een andere wijze zinvol besteedt kan worden of niet.
Efficiënter, maar is het ook leuker? Ik ben liever de chauffeur dan de passagier die tijd over heeft voor nieuwe tijdsdingen om het maar zo te noemen. Diezelfde dingen die onderdeel zijn van het probleem van steeds meer burnouts(altijd maar bereikbaar zijn en <buzzword alert> efficiëntie).
Kijk gewoon naar wat mensen op de trein doen. Zelf doe ik wat mails en de krant 's morgens terwijl ik mijn koffie drink; 's avonds lees ik een boek of kijk naar een of andere serie op Netflix. Andere mensen zie ik vergelijkbare dingen doen, of babbelen, of gewoon wat muziek luisteren of zelfs gewoon een dutje doen. Heb nog niet vaak iemand tegen gekomen die aangaf liever achter het stuur in de file te zitten.
IMHO, het enige nadeel aan de trein is de trip van/naar het station en het overstappen. Ik zou het fantastisch vinden als de trein mij voor de deur thuis en op het werk zou ophalen/afzetten.
Nee omdat die het blijkbaar fijn vinden in de trein. Als iedereen dat zou denken zou er überhaupt geen file staan. Ik heb er geld voor over om niet met de trein te hoeven gaan in elk geval, ook bij file. Tenzij ik voor de totale reis significant meer tijd kwijt zou zijn. Maar van deur tot deur is die kans bij mij niet zo groot...
En welk onafhankelijk onderzoek toont dat aan dan? Ik kan ook wel alles roepen wat de fabrikant aangeeft, maar de geschiedenis heeft toch wel vaak genoeg uitgewezen dat je het meeste met een wassen neus moet nemen.
De frequenties, aantal lasers en sterkte verschillen behoorlijk per Lidar systeem, dit staat letterlijk in het artikel. Als er onafhankelijk onderzoeken zijn waarbij men kan aantonen dat een bepaald systeem totaal geen schade kan veroorzaken op wat voor manier dan ook dan is het inderdaad ook geen probleem.
Die golflengte waarop de lidar werkt bereikt je netvlies niet. Je oogbol filtert dit eruit. Boeit niet of dit van 1 of 1000 auto's afkomt.
Met elke vorm van straling is het juist de absorptie die het probleem is!
De veiligheid zit hem in de hoeveelheid energie die gewoon extreem laag is. Zoals een van de makers schrijft: "All Velodyne LiDAR sensors, including the HDL-64E, HDL-32E (pictured on left), and the VLP-16 Puck series are categorized as class I laser products. Each sensor has between 16 and 64 lasers, which rapidly rotate at approximately 10 hertz, or 10 full revolutions per second. Meanwhile, each individual laser pulses at a wavelength of 905nm with an average power of 2 milliWatts. For comparison purposes, this is about 1/5,000th or 0.02% of the power output in your standard 10-watt LED headlamp bulb on a low-beam setting."
Wat zou het doel zijn van een UV camera? IR kan ik me nog voorstellen, UV niet echt.
En om eerlijk te zijn, zullen al die grote bedrijven die hiermee bezig zijn hier geen rekening mee hebben gehouden? Ik kan me niet voorstellen dat er zoveel miljarden in Lidar wordt gestopt voor zelfrijdende auto's zonder dat iemand zich ooit de vraag heeft gesteld hoe dat met interferentie zit. Dus ik verwacht in de praktijk met met modulatie over de lichtpulsen heen en daarna bijvoorbeeld een puls compressie filter of iets soortgelijks dat interferentie goed weggefilterd kan worden.
En Musk heeft ook een hele zooi actieve systemen in zijn auto's: ultrasoon en radar. Die interfereren ook, en die lossen dat ook op.
Bij het maken van een foto werd er schade aangericht aan de camera.
Mij was dat niet bekend dat dat in die mate mogelijk was en ik geloof niet dat veel mensen dat weten. Nu dat bekend is en er vaker op zal worden gelet moet je je gaan afvragen of dit wel een juiste weg is en/of er mogelijkheden zijn voor andere frequentie.
Daar waar je in misschien in eerste instantie zou zeggen dat de gewone burger/consument aanklacht gaat indienen omdat zijn smartphone kapot is,
is het grootste risico andere weggebruikers. Die gebruiken al vormen van camera’s voor onder andere automatisch inparkeren.
Uit datzelfde artikel bleek ook dat veruit de meeste Lidar systemen op een frequentie al lang zitten waarbij dit geen punt is. Dat ene systeem zit alleen op veel hogere vermogens, wat kan omdat het menselijk oog niet beschadigd kan worden door die frequentie (nou ja, binnen redelijkheid), maar cameras hebben die bescherming niet.
Voor dat specifieke type is het natuurlijk een heel relevant punt, een auto die alle cameras in de omgeving beschadigd kan niet een goed idee zijn, maar het heeft verder geen invloed op het idee van een Lidar gebruiken, gezien veruit de meeste Lidar systemen gewoon op normale infrarood frequenties zit met de bijbehorende veel lagere vermogens.
Met UV zie je een compleet andere wereld. Organische materialen absorberen vaak UV terwijl inorganische het reflecteren. Hierdoor vallen de contouren vaak extra goed op waar het onder zichtbaar licht en IR het veelal een stuk lastiger is om dit onderscheid te maken. Je zou op die manier al snel een basale onderscheiding kunnen maken tussen levende wezens en straatmeubilair. Dit zou je dan weer kunnen gebruiken voor ontwijkingsalgoritmes. Even een uit de duim gezogen voorbeeld: liever langs een muur schrapen dan een mens scheppen.
Zo zijn er nog veel meer objecten die een stuk beter opvallen onder UV licht dan in de andere spectra. Het is, net zoals bij gewoon licht en IR een kwestie van uitproberen en kijken of de neurale netwerken getraind kunnen worden op UV beelden.
Ik weet niet of de grote bedrijven bezig zijn met de interferentiekwestie. Het is heel erg makkelijk om je puur en alleen te concentreren op het probleem voorhanden (één auto zelfstandig laten rijden) en de rest uit het oog te verliezen. Zolang er geen nieuwsberichten verschijnen hierover is het verder pure speculatie hoe de ontwikkelaars denken.
Daarop inhakend, Wallace zei iets van: "(...) De camera is een optisch systeem dat het moeilijk heeft in het donker of bij een sneeuwstorm."
Maar er bestaat ook nog zoiets als Event Cameras, deze hebben minder moeite met donker. Deze camera's werken namelijk door te kijken naar de intensiteit verschillen die het ontvangt. Mocht de Tesla dat al gebruiken, dan mis ik dit in de bespreking van dit stuk.
en daar zijn ook gewoon oplossingen voor, behalve CWFM. Maar lidar bouwers zijn nog bezig basale functies van de lidar in orde te krijgen(staan ook in de link, net zo goed als militair system hun radar niet zo makkelijk kunnen laten verstoren )
Hoe veilig zijn die 'laserkanonnen' voor de mens als er honderden auto's over kruispunten razen waar je langs loopt?
Op de eerste pagina staat:
"bij snel roterende lidarsystemen speelt dat veel minder en veelal is het vermogen van individuele laserpulsen bijzonder laag."
Dan gaat het om een individuele laser, terwijl je ogen straks 'bestookt' worden met pulsen.
Elke individuele puls is 'ongevaarlijk', maar wat is het risico en gevaar van gelijktijdige pulsen?
Het belangrijkste gevaar van een laser is dat hij wordt afgebeeld op je netvlies, en daar lokaal (dus waar hij gefocust wordt) schade kan aanrichten. Als het vermogen hoog genoeg is natuurlijk.
Bronnen uit verschillende richtingen worden op verschillende punten op je netvlies afgebeeld, dus ze kunnen niet tegelijk schade aanrichten op hetzelfde punt.
Als fotocamera's kapotgebrand worden, zal dat ook zo zijn voor bewakingscamera's, flitscamera's, de optische sensoren van andere wagens.
Dat het voor mensen waarschijnlijk geen kwaad kan, is niet goed genoeg. Een autorit over autsnelweg zal al duizenden blootstellingen geven. Men zal zeker moeten zijn dat niemands netvlies weggeschroeid wordt.
De kans is heel heel heel heel *1000 klein, maar op zich wel iets om over na te denken.
Wat gebeurt er als 3 lasers tegelijkertijd je oog inkomen met dezelfde hoek ? (binnenspiegel, buitenspiegel, voorruit)
Veranderd de golflengte dan? Is er iets als resonantie in lasers? (geen idee)
Wat er gevaarlijk is aan laser voor oog/camera is het vermogen van de laser. Als je meerdere lasers op exact het zelfde moment binnen zou krijgen dan mag je deze vermogens bij elkaar optellen.
Over het algemeen worden veiligheidslimieten 10x onder het schadelijke nivo gelegd, dus als er 10 lasers tegelijk binnen komen heb je een probleem.
Ik heb zo'n vermoeden dat de lidar over grenzen heen gaat als hij wordt gecertificeerd. En dat gaan ze waarschijnlijk oplossen door het vermogen dynamisch te maken: hoog vermogen voor grote afstand, laag vermogen voor nabije objecten.
Er zijn al heel wat foto camera's door gebrand door lidar, ik ben er dus niet zo gerust op
plus wat is de invloed op dieren die hebben vaak ogen met andere bandbreedte en zien licht dat wij niet zien of hebben last van knipperen de lampen terwijl onze ogen dit niet niet registreren.
Als ge 4 radiatoren in u living hebt die elk 30 graden zijn dan wordt het 30 graden in uw living en geen 120 graden he
Ge moogt die graden niet optellen he.
Laser licht is niks anders dan licht. Te veel licht is schadelijk voor je netvlies, maar dat geld voor elke lichtbron. Daar zijn heus richtlijnen voor.
Op het moment zijn er ook duizenden auto's met LED lampjes, en honderden LED lampjes in elk stoplicht. Dat zorgt ook niet voor oogschade. Zolang het vermogen laag is is er niks aan de hand.
Wat ik mis in het verhaal, hoe gaat lidar om met slecht weer? Een flinke sneeuw of regenbui schakelt nu de autonome systemen van mijn Volvo uit. Kan lidar daar mee overweg?
Bij regen en sneeuwval is de lidar praktisch onbruikbaar omdat er dan weinig zinnige data uitkomt. Het succes voor een volledige autonome auto is sensor fusion. Hiermee gebruik word alle bruikbare informatie van de lidar, radar, camera en ultrasoon samengevoegd om het beeld om de auto op te bouwen. Als het dan bijvoorbeeld regent wordt er meer op de radar en camera vertrouwd omdat de lidar onbruikbaar is. Verder betekent dat er door middel van sensor fusion een redundante systeem is voor de sensoren wat de betrouwbaarheid van een autonome auto verhoogd.
Leuk voor flitspalen dit systeem.
Moeten ze daar weer wat op verzinnen; Verder even off-topic... Ik zou helemaal gek worden als ik er achter kwam dat mijn camera verpest is op een techbeurs door lasers. Zeker als er nergens gewaarschuwd wordt voor de lasers (lijkt mij anders had had hij de camera niet eens gebruikt lijkt me)
Ik denk niet dat ze zich erg bewust waren van het probleem, of niet op een schaal dat ze het significant genoeg achtte. Ik neig naar dat dit een gevalletje "Achteraf is alles makkelijk" is.
Op grote schaal wordt het niks met zelfrijdende autos. Ten minste niet binnen ‘korte’ tijd. Maar op besloten terreinen zou het best wat kunnen worden. Maar een hele verkeer met zelfrijdende voertuigen zie ik nog lang niet voor me.
[Reactie gewijzigd door Cihan1988 op 23 juli 2024 02:41]
Hoe vaak hebben we dat al niet gezegd over nieuwe technieken. En soms gaat het gewoon veel sneller dan verwacht. Niemand heeft een glazen bol. For all we know zij wagens binnen 10 jaar standaard niet meer uitgerust met een stuurinrichting.
Zo lang er "domme" auto's rondrijden, zal een menselijke bestuurder nodig zijn om in te grijpen bij systeemfalen. Voorlopig rijden er nog auto's rond die meer dan 100 jaar oud zijn (Ja, dat is een extreem voorbeeld, ik weet het), maar zoals gezegd zal het dus heel lang duren voordat 100% van het verkeer "slim" of autonoom is. Tenzij de overheid ingrijpt en het afdwingt, maar dat zie ik niet snel gebeuren.
Zo lang er "domme" auto's rondrijden, zal een menselijke bestuurder nodig zijn om in te grijpen bij systeemfalen.
Wat bedoel je met systeemfalen? Door middel van o.a. redundantie kun je de kans dat het systeem uitvalt vele malen kleiner maken dan de kans dat een menselijke bestuurder onwel wordt.
Of bedoel je dat "domme" auto's voor verkeerssituaties kunnen zorgen waarmee het systeem niet kan omgaan? Waymo kreeg al toestemming om in Phoenix, Arizona, zelfrijdende auto's zonder menselijke backup te laten rondrijden. Ze kunnen aannemelijk maken dat, als die een bijzondere verkeerssituatie niet aankunnen, ze altijd nog in staat zijn om veilig tot stilstand te komen (ik stel me voor dat daarna mogelijk nog assistentie op afstand of ter plaatse nodig zal zijn om weer op weg te komen, maar dan heb je het over ongemak en niet over ongelukken). En laat er dan nog wat jaren ontwikkeling en ervaring overheen gaan. Ik denk dat zelfrijdende auto's zonder menselijke backup in de auto iets is dat zeker haalbaar is.
Nou bijvoorbeeld met halloween als de auto moet uitwijken en de AI niet in staat is sommige verklede mensen als mens te herkennen en bij extreme beslissingen misschien de verkeerde afweging maakt. Maar misschien onderschat ik de AI. Het is ook wel een edge-case maar ook aan de edge rijden autonome auto's.
Aparte rijbanen voor autonome en door mensen bestuurde auto's. In de VS zijn ook aparte carpool lanes waar je enkel mag rijden met meerdere inzittenden.
Autonome auto's kunnen veel efficiënter gebruik maken van het wegdek (sneller reageren, communiceren bij in-/uitvoegen, niet afgeleid door ontelbare factoren) dus dan mogen de ouderwetsche menschen lekker inefficiënt met z'n allen stilstaan op die overige rijbanen.
Extra rijbanen aanleggen werkt vrijwel nooit tegen de toenemende drukte en is dus verspilling van geld. Met z'n allen iedere dag gezamenlijk in de file staan is een enorme verspilling, zowel qua tijd als geld. Ik kan niet wachten totdat er een auto 's ochtend voor komt rijden, mij naar mijn werk brengt tijdens het lezen van het nieuws, om daarna iemand anders op te gaan pikken die later een afspraak heeft. Eigen bezit zal steeds schaarser (onbetaalbaar?) worden en onnodig als de gemiddelde auto 95% van de tijd stil staat.
Daar heb je gelijk in. Mijn punt is alleen dat ik die specifieke banen niet snel zie verschijnen op Nederlandse wegen. Ja, het is een beetje kip-ei. Eerst meer auto's die autonoom kunnen rijden, of eerst de juiste omstandigheden voor autonoom rijden inregelen? Wie het weet mag het zeggen.
Zo lang er nog weinig/geen auto's zijn die volledig autonoom kunnen rijden, gaat dat gewoon niet gebeuren. Op zijn vroegst wanneer 30-50% van het wagenpark volledig autonoom kan rijden. En dat zal nog jaren duren.
We zitten misschien op een tech-site, maar over 20 jaar rijdt er nog niets eens 10% volledig autonoom. Als dit ooit gaat gebeuren. Afgezien van de technische en economische zaken, ben ik wel benieuwd hoe autofabrikanten zich in gaan dekken wanneer er ongelukken plaats vinden door hun autonome voertuigen.
Ik zie de rechtszaken al voor mij wanneer de eerste dodelijke ongelukken plaats vinden met volledig autonome auto's.
Wanneer auto's met elkaar gaan communiceren wordt het ook gemakkelijker om deze communicatie te onderscheppen of te verstoren, met alle gevolgen van dien. Daarnaast zijn er voetgangers, fietsers, overige auto's en tal van weggebruikers die niet communiceren.
Overal zijn oplossingen voor te verzinnen, maar uiteindelijk komt het maar op een ding neer en dat is de betaalbaarheid van de auto.
Heb je het toevallig voorgerekend, want het komt precies uit als we vandaag beginnen met alleen autonome auto's te maken :-P
Er zijn 1.2 miljard auto's op de wereld.
Er worden iets minder dan 6 miljoen auto's per jaar gemaakt, over 20 jaar tijd dus 120 miljoen. als we nu beginnen liggen we over 20 jaar op schema :-P
(maar realistisch gezien is het aantal auto's over 20 jaar significant meer, of juist minder als er andere oplossingen komen)
Dus heel realistisch is dat niet inderdaad.
Dat wil echter nog steeds niet zeggen dat je het niet gaat merken.. zeker in de welvarende landen moet dit uiteindelijk merkbaar zijn.
Je zou het bijna denken dat ik het uitgerekend heb als ik zo naar je berekening kijk, maar dit was niet het geval
Gezien de levertijden van de huidige elektrische auto's al zo hoog ligt en de ontwikkelingen van volledig autonome auto's nog wel minimaal 5 jaar gaat duren voordat ze in productie worden genomen zie ik geen mogelijkheid dat we veel volledig autonome auto's tegen die tijd zullen zien.
Het bovenstaande bericht is misschien wel uit 2016, maar de trend is duidelijk. De gemiddelde leeftijd van personenauto's wordt steeds hoger. In 2016 was 50% van alle personenauto's in Nederland 9 jaar of ouder. Het duurt zeker nog wel 10 jaar voordat de meeste personenauto's over zijn op elektrische auto's als de overheid niet ingrijpt en de bpm van deze voertuigen verlaagd of achterwege laat.
Er zullen vast wel volledig autonome auto's komen, maar wie gaan deze uiteindelijk aanschaffen? In het beginstadium zijn ze niet te betalen en de echte rijken hebben al een privé chauffeur.Taxibedrijven? Zodat we straks geen taxi chauffeurs meer nodig hebben en deze allemaal van onze belastinggeld moeten leven? De tijd zal het uitwijzen, maar over 20 jaar rijden er inderdaad niet massaal volledig autonome auto's.
Op dit moment hebben de meeste nieuwe auto's al systemen aan boord die veel voor je regelen: Adaptive Cruise Control, lane assist, verkeersbordherkenning. Mijn Golf uit 2015 heeft dit ook allemaal aan boord.
Over 5 jaar vermoed ik dat alle auto's worden uitgerust met dit soort technologie. Maar ook dat het tegen die tijd al verder gaat: Fabrikanten willen leren van gebruikers, dus ze stoppen een 5G chip in de auto om updates te kunnen downloaden, maar ook om (opt-in only) jouw rijgedrag te kunnen uploaden naar hun servers.
Over 10 jaar zal de enorme stroom aan data veel hebben opgeleverd, en de auto's in de voorgaande 5 jaren zullen steeds beter zijn geworden waarna ze niet meer onderdoen voor de mens, en zelfs altijd bovenmenselijk acteren.
Over 15 jaar kijken we terug naar 5 jaar lang autonoom rijden. Auto's communiceren met elkaar, al dan niet indirect (door te herkennen óf een andere auto autonoom rijdt en jouw auto dus kan voorspellen wat het gedrag gaat zijn), maar waarschijnlijk ook direct. Als jouw auto een obstakel niet ziet maar een andere auto wel, dan kan hij dat aan jou vertellen.
Tegen de tijd dat we 20 jaar verder zijn in het jaar 2039 vermoed ik dat het merendeel van alle auto's (ver boven de 10%) volledig autonoom kunnen en zullen rijden.
Zelfrijdende auto's wordt ook pas echt gemeengoed zodra het merendeel van de auto's hiermee is uitgerust.
Jammer dat de Nederlandse fabrikant Innoluce niet genoemd wordt, hun lidar wordt volgens mij al gebruikt in productie auto's.
Als ik dit zo lees, betreft het verstoren van de lidar, is er uberhaupt eigenlijk wel eens getest of die lidars nog wel goed werken als je er 10 naast elkaar zet? (10 auto's naast elkaar of achter elkaar)
Kan me er iets bij voorstellen dat die elkaar gaan beinvloeden als ze allemaal dezelfde golflengte pakken.
Haha heb het artikel gelezen en de twee reacties spreken elkaar behoorlijk tegen:
Reactie1:
"One could use lasers with slightly different wave length - just as different channels for Wi-Fi signal. Also there could be used some kind of wave modulation... but I don't think LIDARs use such solutions, since laser point is so small, that case of interference with other sensor is... kinda, rare event."
Reactie 2:
"Based on two different company's sensors for use in autonomous cars - yes they do interfere. And honestly, I am not sure what is going to happen when you have 30 cars in an intersection, the noise will be horrendous and they will not work."
Overigens is reactie 1 complete bullshit. Je kan de laser wel een andere wavelength geven maar ik wens je heel veel succes om dan te achterhalen welk signaal van jou was met dat kleine verschil want je sensor gaat dat echt niet meten. En filteren kun je ook vergeten.
Eerlijk gezegd denk ik dat dit een serieus probleem kan zijn, tenzij je een manier vindt om je signaal inderdaad te coderen met een uniek ID zodat je jouw signaal kan onderscheiden. Denk alleen dat zoiets ook heel tricky wordt met licht, met radar gebeurt het nu al volgens de tweede reactie van t artikel.
Zal er overigens ook zelf wat meer naar kijken/zoeken.
Ben nu wel geïnteresseerd geraakt in het juiste antwoord. Mijn gevoel zegt dat de lazer precies 180 graden terug naar de bron moet, om een afstandsmeting te kunnen doen. Net als bij je bouwmarkt afstandsmeter. Maar hoe/of dit werkt op schuine oppervlakte weet ik niet. Als dit wel zo is, dan zou een andere afstandsmeter deze ook op kunnen pakken, omdat 180 graden dan geen vereiste is.
Vervolgens is het nog de vraag hoe erg het is als hè een aantal ruismetingen in je resultaat hebt. Zolang het merendeel klopt, en je hebt een goede resolutie, zie ik niet echt een probleem.
Maar goed, wat ik denk en hoe het in het echt werkt kan uiteen lopen.
Het blijft fascinerend dat een mens in een auto de complete omgeving op kan nemen met niks meer dan twee beweegbare 'camera's' (lees: ogen), terwijl een machine daar tot 20 camera's, lidar en radarmodules voor nodig heeft.
Als mensen in het verkeer zouden rijden als machines; dus emotieloos en volgens een set (verkeers)regels, met de hulp van wat basistechniek (bijv. adapting cruise control) dan zou het aantal ongelukken drastisch afnemen; immers is de menselijke factor in de auto oorzaak #1 van de meeste ongelukken in het verkeer.
Stel dat men de computerkracht en de AI kan verbeteren dan zou een auto ook machinaal bestuurd kunnen worden met niks meer dan met een aantal goede camera's. Dan heb je de voordelen van de AI (reactiesnelheid, geen emoties) plus de éénvoud en kostprijs van sensoren
Wat lijkt te ontbreken aan dit verhaal is dat LIDAR inderdaad erg belangrijk is om objecten te detecteren maar bijzonder slecht (of totaal ongeschikt) is om de voor mensen gemaakte aanduidingen te zien. Van verkeersborden tot aan wegmarkeringen. Een auto met een LIDAR systeem heeft daarnaast altijd een camera systeem nodig.
Wegen zijn gemaakt voor menselijk ogen. Van zichtlijnen, via kleurkeuzes tot aan contrasten. Daarom is de keus van Tesla op dit moment ook verdedigbaar (hoewel een Tesla natuurlijk ook een radar heeft).

/i/2002474622.jpeg?f=imagegallery)
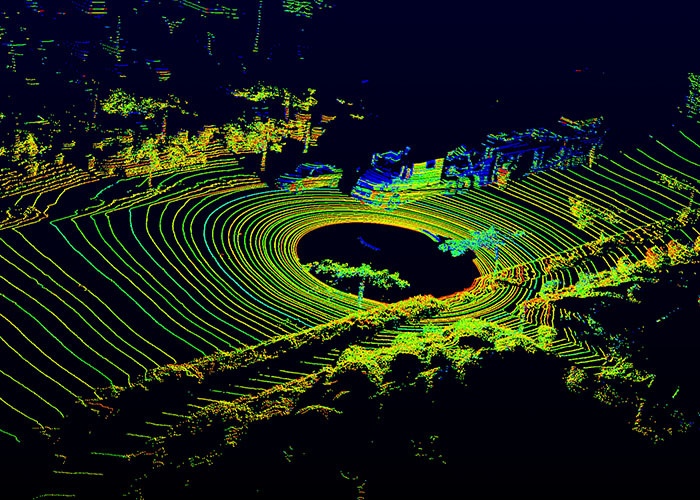



 Solidstatelidars
Solidstatelidars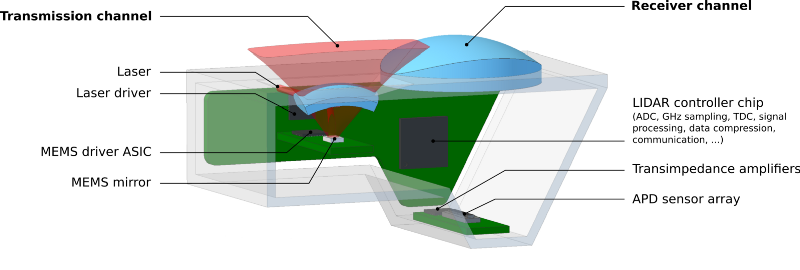





/i/2002477404.jpeg?f=imagenormal)

/i/2004609076.png?f=fpa)
/i/2001507233.png?f=fpa)
/i/1405520342.png?f=fpa)
/i/2000780889.png?f=fpa)
:strip_exif()/i/1262854302.gif?f=fpa)
:strip_exif()/i/2002469770.jpeg?f=fpa)
:strip_exif()/i/2003043884.jpeg?f=fpa)
/i/2002004047.png?f=fpa)
/i/1354102800.png?f=fpa)
:strip_exif()/i/2001440689.jpeg?f=fpa)
/i/1274010398.png?f=fpa)
/i/2000541353.png?f=fpa)
/i/2001963285.png?f=fpa)
/i/2000615199.png?f=fpa)
/i/1286710361.png?f=fpa)
/i/1192792707.png?f=fpa)
/u/411173/Untitled.png?f=community)
:strip_exif()/u/467778/crop5d7a5dd1f296a.gif?f=community)
/u/85011/crop65747d648e683_cropped.png?f=community)
/u/34556/welles60x60.PNG?f=community)
/u/10064/leuk_he.png?f=community)
/u/488034/crop5bc05764b1211_cropped.png?f=community)
:strip_icc():strip_exif()/u/145751/check-in-minion-small2.jpg?f=community)
:strip_icc():strip_exif()/u/399094/crop599f285449da6_cropped.jpeg?f=community)
/u/741353/crop56d8016c31e07_cropped.png?f=community)
/u/223279/Congressman.png?f=community)
:strip_icc():strip_exif()/u/397908/crop5a8183633ae3b_cropped.jpeg?f=community)
/u/463361/crop5c5017eed16bd_cropped.png?f=community)
:strip_icc():strip_exif()/u/251538/smiley2.jpg?f=community)
:strip_icc():strip_exif()/u/78725/train-icon3.jpg?f=community)
/u/257022/crop629738e7a7bae_cropped.png?f=community)
/u/380683/crop5848673f28e5a.png?f=community)
:strip_icc():strip_exif()/u/235816/crop596740581e453_cropped.jpeg?f=community)
/u/10340/bender2.png?f=community)
:strip_exif()/u/473283/crop5f75dd3322e33_cropped.gif?f=community)
/u/12612/crop65b399f21bc43_cropped.png?f=community)
:strip_icc():strip_exif()/u/133253/NOVIR350.jpg?f=community)
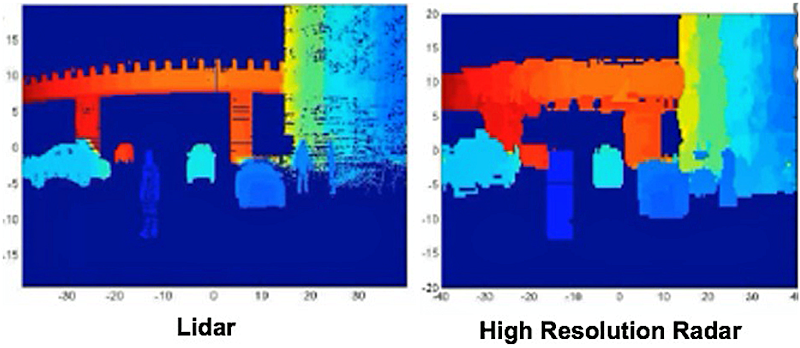{kind=link}