
'Lidar' is een afkorting die te vergelijken is met 'radar', wat staat voor radio detection and ranging. De term radar is echter allang ingeburgerd en is zodoende volledig geaccepteerd als zelfstandig woord, waarbij de volledige formulering nog zelden wordt gehanteerd. Datzelfde gaat ongetwijfeld ook ooit gebeuren met lidar, mits deze systemen daadwerkelijk dominant worden bij zelfrijdende auto's. Lidar is een afkorting voor light detection and ranging. Uitgeschreven lijkt dit erg op radar. Er zijn dan ook overeenkomsten; zowel bij radar als bij lidar worden signalen uitgezonden om vooral de afstand tot objecten te bepalen. Het grote verschil is dat dit bij radar gebeurt door het uitsturen van radiogolven; lidars maken in plaats daarvan gebruik van laserlicht.
Waarom is lidar nodig?
Waarom is een dergelijk systeem, gebaseerd op licht, eigenlijk nodig? De op radiogolven gebaseerde radars hebben tenslotte een vergelijkbare functie. Jada Tapley, adjunct-directeur van het mobiliteitsbedrijf Aptiv, is daar duidelijk over. "Stel je voor dat er midden op de weg een loopvlak van een autoband ligt, afkomstig van een grote vrachtwagen. Radar zal dat niet detecteren, maar lidar wel." Aptiv is overigens het bedrijf dat de autonoom rijdende Lyft-auto's bouwde die in 2018 gebruikt werden voor het vervoeren van personen in Las Vegas, in het kader van de CES-beurs. De vaststelling van Tapley heeft te maken met de golflengte van radiogolven, die beduidend groter is dan die van laserlicht. Dat betekent dat als kleine objecten worden aangestraald door radiogolven, er een grote kans is dat onvoldoende energie wordt teruggekaatst om te worden gedetecteerd. De veel kleinere golflengte van lasers leidt ertoe dat ook kleine objecten worden gezien; de resolutie is bij lidar dus een stuk fijnmaziger dan bij radar, ook al heeft radar het voordeel dat het over een langere afstand werkt, doordat er minder sprake is van absorptie.
Bij de meeste lidars wordt de afstand tot een object in kaart gebracht op basis van de tijd die verstrijkt tussen het moment van het uitzenden van de puls en het moment waarop de gereflecteerde puls wordt opgevangen, wat time-of-flight wordt genoemd. Lidar-sensoren zijn er in allerlei soorten en maten, waarbij een sensor uit bijvoorbeeld een enkele laser, 16 stuks of zelfs 128 lasers kan bestaan. Ook de frequenties variëren nogal: van enkele tienduizenden pulsen tot een miljoen of meer per seconde. Na het scannen van de pulsen in verschillende richtingen levert dit een driedimensionale puntenwolk op, waarbij elke punt zijn eigen x-, y- en z-coördinaten heeft. De ruimtelijke en diepte-informatie van deze puntenwolk is bijvoorbeeld bruikbaar om objecten te identificeren en te volgen.
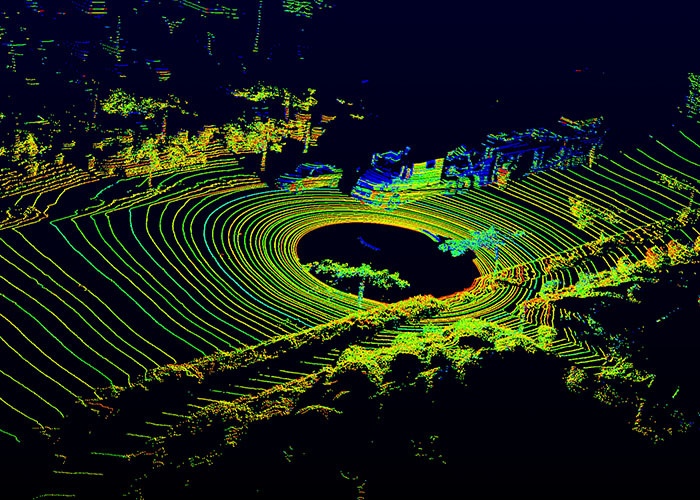

Dit is wat de Velodyne HDL-64E 'ziet'. De 64 lasers leiden tot 64 lijnen met data.
Lidars en de eventuele daarop gebaseerde 3d-kaarten worden allerminst alleen bij zelfrijdende auto's gebruikt. De politie gebruikt lidars in de vorm van laserguns die pulsen met golflengtes van 904nm afvuren om snelheidsduivels op de bon te slingeren. Archeologen en geografen gebruiken ze bijvoorbeeld om terrein in kaart te brengen. Hoe meer pulsen per seconde worden afgevuurd, hoe preciezer de puntenwolk is. Lidar was in de begindagen van het gebruik door archeologen nauwelijks bruikbaar, doordat de frequentie te wensen overliet. Wetenschapper William E. Carter zei dat lidars vroeger, in de jaren zeventig, niet verder kwamen dan 5000 pulsen per seconde. Als je daarmee een vliegtuig uitrustte voor archeologisch onderzoek, 'kon je je hele leven lang over de bomen vliegen zonder enig resultaat'. De meeste pulsen ketsten af van bladeren en waren daardoor nooit in staat de grond te bereiken. Bij het huidige onderzoek is de frequentie 600.000 pulsen per seconde, waarbij sprake is van vier 'stops per schot'. Het lidarsysteem kan per puls als het ware door drie obstakels heen kijken, waarbij het vierde object de grond is.
Waaruit bestaat een lidarsysteem?
Voor een gemiddeld lidarsysteem is meer nodig dan enkel een laser. Om de pulsen uit te zenden, worden bijvoorbeeld snel roterende polygoonscanners gebruikt, waarbij de scanner ook de hoek meet waaronder de pulsen via een spiegel worden afgeschoten. Daarnaast is een plaatsbepalingssysteem zoals gps nodig om de datapunten te kunnen combineren met de x-, y-, en z-coördinaten van de scanner, zeker als de lidar wordt gebruikt op een bewegend voertuig of vliegtuig. Daarbij mag ook een inertial measurement unit niet ontbreken. Dit apparaat bestaat uit een versnellingsmeter, een gyroscoop en een magnetometer die gezamenlijk de oriëntatie van de scanner ten opzichte van de grond meten. Verder is een fotodetector nodig om de teruggekaatste pulsen te registreren. Tot slot is een precieze klok nodig om te registreren hoe lang een puls erover doet om na het afvuren terug te keren.
/i/2004609076.png?f=fpa)
/i/2001507233.png?f=fpa)
/i/1405520342.png?f=fpa)
/i/2000780889.png?f=fpa)
:strip_exif()/i/1262854302.gif?f=fpa)
:strip_exif()/i/2002469770.jpeg?f=fpa)
:strip_exif()/i/2003043884.jpeg?f=fpa)
/i/2002004047.png?f=fpa)
/i/1354102800.png?f=fpa)
:strip_exif()/i/2001440689.jpeg?f=fpa)
/i/1274010398.png?f=fpa)
/i/2000541353.png?f=fpa)
/i/2001963285.png?f=fpa)
/i/2000615199.png?f=fpa)
/i/1286710361.png?f=fpa)
/i/1192792707.png?f=fpa)