
Of je nou fan bent van het merk of niet: niemand kan ontkennen dat Tesla op vrijdag 10 april een unieke mijlpaal heeft bereikt. Full Self-Driving (Supervised) is het eerste systeem dat in Europa is goedgekeurd waarbij de auto zelf van A naar B kan rijden. De bestuurder hoeft alleen op te geven waar hij of zij heen wil en de Tesla regelt – in theorie – de rest.
Natuurlijk zijn er wat belangrijke haken en ogen, maar dat neemt niet weg dat FSD Supervised verreweg het geavanceerdste systeem is op de Europese openbare weg. Dat ging niet zomaar. De autofabrikant werkte hier jarenlang aan om de software en de hardware te ontwikkelen en het nodige onderzoek te doen. Pas toen het systeem klaar was, kon het bedrijf bij de RDW vragen om goedkeuring. Die had weer ruim anderhalf jaar nodig om te toetsen of het daadwerkelijk veilig genoeg is voor de Nederlandse wegen.
Dit artikel gaat over die goedkeuring. Waarom liet die zo lang op zich wachten en waarop is die goedkeuring gebaseerd? Bij mijn eerste rit met FSD vielen me ook een aantal zaken op, zoals de mogelijkheid om de auto harder te laten rijden dan mag en hoe de auto herkent of ik oplet. Daarnaast vroeg ik jullie eerder wat jullie nog wilden weten; ook daar ga ik in dit artikel op in.
RDW als typegoedkeuringsautoriteit
Als autofabrikanten een nieuwe auto willen uitbrengen in de Europese Unie, moeten ze hiervoor aankloppen bij een typegoedkeuringsautoriteit in een van de lidstaten. In Nederland is dat de RDW. In principe is een fabrikant vrij om aan te kloppen bij welke autoriteit en land hij maar wil. RDW keurde de eerdere Tesla's goed, waardoor Tesla die mocht verkopen in de hele EU.
De HW3-vormige olifant in de kamer
FSD is vooralsnog alleen beschikbaar voor HW4, dat sinds 2023 in Tesla's zit. De autofabrikant beloofde (en verkoopt) ook FSD Supervised voor HW3-modellen, met slechtere camera's en minder krachtige hardware. Tesla zegt tegen Tweakers eraan te blijven werken om de beschikbaarheid van FSD (Supervised) verder uit te breiden, 'zodat het in de toekomst ook kan worden ingezet op extra voertuigen'. "Beschikbaarheid daarvan hangt af van de ontwikkeling en goedkeuring door de autoriteiten." De RDW gaf aan dat Tesla alleen goedkeuring aangevraagd en gekregen heeft voor HW4, dus niet voor HW3.
Ook voor FSD klopte het bedrijf aan bij de RDW. FSD Supervised is alleen iets anders dan 'een auto'. Voor auto's gelden Europese afspraken waaraan ze moeten voldoen, waardoor auto's relatief eenvoudig te toetsen zijn. Het 'probleem' is dat FSD Supervised innovatief is en daardoor niet helemaal voldoet aan de bestaande regelgeving.
VN-verordening biedt uitkomst
Dat wil niet zeggen dat er helemaal geen mogelijkheden zijn. De EU heeft verschillende routes voor fabrikanten die een uitzondering willen op de huidige regels. Als basis gebruikte Tesla het UN ECE reglement 171, dat de VN in 2024 aannam en de EU heeft overgenomen. Dat gaat over driver controlled assistance systems, die bestuurders aanhoudend assisteren bij het rijden – FSD Supervised dus. Via artikel 39 van EU-kaderverordening 2028/858 kun je een ontheffing aanvragen om te mogen afwijken van bepaalde eisen in reglement 171, als het om nieuwe technologie gaat.
"Een belangrijk onderdeel van dat artikel is dat het nieuwe systeem aantoonbaar net zo veilig moet zijn als auto's die nu op de weg rijden in de EU", legt de RDW uit aan Tweakers. Met andere woorden: het hoeft niet net zo veilig te zijn als een mens die zonder hulpmiddelen rijdt, maar wél net zo veilig als andere assisterende systemen, zoals adaptieve cruisecontrol of systemen die je in de rijbaan houden.
Het idee is dat de veiligheid van die systemen is geaccepteerd door de maatschappij, toezichthouders en de overheid, dus dat dat een veilige 'benchmark' is om toe te staan voor die innovatieve systemen. FSD Supervised moet dus net zo veilig als of veiliger zijn dan de huidige technologie.
Eerst de statistiek in, dan de (test)weg op
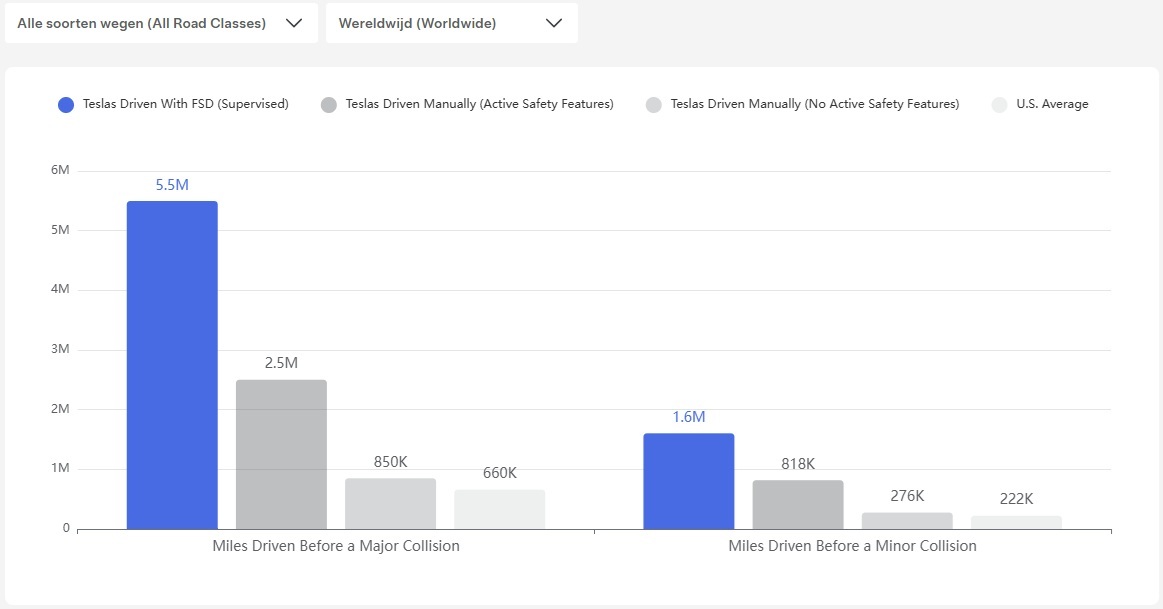
Veiligheid is natuurlijk een relatief begrip. Wat de een veilig vindt, kan voor de ander juist onveilig zijn. De RDW keek daarom naar onderzoeksdata van Tesla over de kans dat er iets met FSD Supervised gebeurt in vergelijking met Tesla's zonder FSD.
Tesla deelt hiervan publiekelijk mooie cijfers, maar de RDW benadrukt ook met Tesla in gesprek te zijn geweest over die data. Wat zit erachter, hoe zijn ze tot stand gekomen, wat betekent het? Een flink deel van die anderhalf jaar zat in dat statistische onderzoek. "We hebben echt een kijkje in de keuken genomen; we beoordeelden hun processen en studies ook."
Daarnaast heeft de RDW praktijkonderzoek uitgevoerd met FSD Supervised, eerst op de eigen testbaan. Op die testbaan werden zaken getest die je liever niet op de openbare weg uitprobeert. Wat gebeurt er als er een kindvormige pop opeens de weg op schiet, of als voorliggende auto's plotseling remmen of op je rijbaan komen? Kan FSD hiermee goed overweg?
De derde stap is op de openbare weg. RDW reed zelf 13.500 kilometer op de openbare weg, in de stad, buitengebieden, et cetera, waarbij bijvoorbeeld ook werd gekeken naar examenroutes van het CBR. "Daarbij hebben we ook in de mist, regen en sneeuw getest. Dus toen het eerder dit jaar flink sneeuwde, ging een van onze collega's direct naar buiten om te kijken wat FSD Supervised zou doen."
Duidelijkheid over wat FSD wel en vooral niet is
Tijdens dit proces had de RDW wat op- en aanmerkingen, waarna Tesla de software heeft aangepast. Het is dus niet zo alsof de RDW alleen een eindoordeel van 'ja' of 'nee' heeft gegeven. Die aanpassingen zitten vooral in het stukje bewustzijn over wat FSD Supervised is – en vooral wat het niet is – en of de bestuurder genoeg oplet bij het rijden.
We kunnen dit namelijk niet genoeg benadrukken: Full Self-Driving (Supervised) maakt van je Tesla géén zelfrijdende auto. De auto kan verregaand ondersteuning bieden tijdens het rijden, maar kan daarbij gewoon fouten maken en rare dingen doen. Je bent dus zelf te allen tijde verantwoordelijk voor wat de auto doet en je moet ook altijd kunnen ingrijpen. Daarom heet het ook wel FSD (Supervised). Je kunt je afvragen waarom Tesla het dan 'Full Self-Driving' noemt. De RDW zegt hierover dat dit mag, zolang Tesla continu uitlegt wat het systeem wel en niet kan.
:strip_exif()/i/2008119512.jpeg?f=imagegallery)
Wanneer je FSD voor het eerst wilt gebruiken, krijg je daarom eerst een instructievideo van zo'n vijf tot tien minuten te zien, met daarna een quiz. Ik schreef het al bij mijn eerste bevindingen: die quiz is niet moeilijk. "Maar het is ook niet bedoeld om moeilijk te zijn. De gedachte is: ben je je bewust van wat Full Self-Driving Supervised is?", zegt de RDW. Dat bewustzijn moet Tesla ook continu communiceren in de handleiding, op de site en in de auto zelf.
Tesla houdt je continu in de gaten
Een belangrijker aspect waarvoor de RDW veel aandacht had, is het systeem dat controleert of de bestuurder daadwerkelijk oplet: het Driver Monitoring System. Hiervoor gebruikt Tesla een camera bij de binnenspiegel. Die controleert de bestuurder continu. Waar kijkt de bestuurder naar? Hoe kijkt de bestuurder? Zijn de handen altijd beschikbaar om in te grijpen?
Dat gaat verder dan alleen de ogen in de gaten houden. Om dagdromen tegen te gaan kijkt FSD bijvoorbeeld hoe de bestuurder knippert, hoe hij of zij beweegt en hoe de houding van het hoofd is. Is dat hoofd wat ingezakt of leunt de bestuurder wat naar achter? Wellicht is die dan aan het dagdromen. De Tesla zou je dan een seintje moeten geven, waarna je weer op de weg moet letten.
:strip_exif()/i/2008119522.jpeg?f=imagenormal)
Het systeem houdt overigens ook rekening met 'de context' van waar je rijdt. Stel dat je in de stad bent, met overal fietsers, auto's en voetgangers om je heen. Dan is het best logisch dat je niet continu in de rijrichting kijkt, omdat je wilt dubbelchecken dat er geen fietsers van links of rechts komen.
Smartphone in je hand? Voor FSD geen probleem
Naast de vraag of je er mentaal bij bent, controleert het DMS ook of je minimaal één hand beschikbaar hebt, zodat je kan ingrijpen. Met één hand achter het hoofd zitten zou dus geen probleem moeten geven. Doe je ze allebei achter je hoofd? Dan kan FSD boos worden.
FSD Supervised kijkt ook naar wat je vasthoudt. Heb je in je ene hand een 'smartphonevormig object' en in de andere een kop koffie? Ook dan kun je meldingen van de Tesla krijgen. Je mag van het DMS ook niet te veel kijken naar dat 'smartphonevormige object'.
Dat wil niet zeggen dat de Tesla smartphonegebruik helemaal verbiedt. Hiervoor had de RDW aandacht, 'maar het kan ook een object zijn dat lijkt op een smartphone', merkt de typegoedkeuringsautoriteit op. En je mag wettelijk gezien een zwarte keukentegel prima in je hand hebben. Ook hier geldt weer dat dit volledig de verantwoordelijkheid is van de bestuurder en niet van Tesla.
De camera is ook geen perfecte oplossing
Het viel mij tijdens mijn dagje FSD al op dat het DMS niet helemaal honderd procent werkt. Ik kon op de snelweg aardig lang naar het Hollandse polderlandschap koekeloeren en heb ook een tijdje gedagdroomd. Delen van dat artikel heb ik tijdens het rijden mentaal al geschreven.
De RDW merkt daarbij op dat het DMS van Tesla op aandringen van de RDW geavanceerder is dan vergelijkbare systemen die bij andere auto's in de gaten houden of de bestuurder oplet. Bij auto's met 'alleen' adaptieve cruisecontrol en rijbaanassistentie kan er dus meer misbruik gemaakt worden, zegt de RDW.
Als je de waarschuwingen van FSD te vaak negeert, kan de functie tijdelijk geblokkeerd worden in je auto. Pas als je die video en toets opnieuw hebt gedaan, mag je weer FSD gebruiken. Al met al blijft FSD Supervised ook met het DMS veiliger dan bestaande systemen, of in ieder geval even veilig, zegt de RDW.
Maandelijkse rapportages
Wat nou als dat in de praktijk tóch anders blijkt te liggen, vragen sommige lezers zich af bij onze artikelen over FSD Supervised. Wat als er aan de lopende band ongelukken met FSD gebeuren? Ook hieraan is gedacht: Tesla moet veiligheidsincidenten direct rapporteren aan de RDW. Harde remacties of rare bewegingen van het voertuig moeten maandelijks gerapporteerd worden aan de RDW. Als het goed blijkt te gaan, kan dit worden afgezwakt naar eenmaal per kwartaal of per jaar. Maar als het te onveilig blijkt, kan de RDW de toestemming ook weer intrekken.
Over Tesla wordt ook wel eens gezegd dat de auto vlak voor een ongeluk herkent dat er een ongeluk gaat plaatsvinden, waarna hij FSD (of Autopilot) uitschakelt. Zo zou Tesla kunnen zeggen dat FSD niet actief was tijdens het ongeluk, om de cijfers zo te kunnen verbloemen. De RDW merkt hierbij op dat autofabrikanten verplicht zijn in de event data recorder het gebruik van zulke systemen bij te houden, ook in de vijf seconden voorafgaand aan een ongeluk.
Geen Mad Max in Nederland
Dat actieve toezicht, de uitlegvideo, de quiz: deze zaken zijn in de VS allemaal anders geregeld dan in de EU. Er zijn wel meer verschillen tussen de Amerikaanse FSD en de Europese. Amerikanen kunnen bijvoorbeeld kiezen uit verschillende profielen, zoals Hurry of Mad Max. Bij dat laatste profiel rijdt de auto agressiever, met bijvoorbeeld meer rijstrookwisselingen, minder ruimte tussen voorliggers en ook een hogere maximale snelheid.
In Nederland zijn er geen profielen en kun je dus niet kiezen hoe FSD Supervised rijdt. Je hebt wel iets te zeggen over hoe hárd FSD rijdt. Je kunt met het gaspedaal FSD sneller laten rijden en met het scrollwieltje een hogere snelheid aangeven. Dit kan in sommige gevallen handig zijn. Het systeem mist soms een snelheidsbord, dus is het fijn dat je zelf een hogere snelheid kunt instellen als de Tesla 50km/u wil rijden in een 80-zone.
:strip_exif()/i/2008119518.jpeg?f=imagenormal)
... maar je kunt wél harder rijden dan mag
Daarnaast kan je FSD ook vertellen dat het áltijd harder mag rijden dan de geldende snelheidslimiet. Je kan de Tesla bijvoorbeeld vertellen dat de auto altijd 5 procent harder mag rijden dan de bebording aangeeft – zolang FSD het veilig acht.
Je hebt ook de 'contextuele maximale snelheid', waarbij de auto afhankelijk van de context de snelheid van het overige verkeer kan volgen voor 'een veilige en natuurlijke verkeersstroom'. Denk aan matrixborden die een significant lagere snelheid aangeven en die Nederlandse bestuurders stelselmatig compleet negeren. Dan kan het – kennelijk – gevaarlijk zijn als jij je wél aan die snelheid gaat houden. FSD kan in zo'n geval de snelheid op de matrixborden negeren en meerijden met het andere verkeer.
Dit vond ik in eerste instantie wat gek. Je kunt FSD dus bewust vragen om continu te hard te rijden. De RDW geeft aan dat hier de verschillen tussen een 'assisterend' en 'geautomatiseerd' systeem in beeld komen. Bij dat geautomatiseerd systeem neemt de auto volledig zelfstandig beslissingen en heb je als bestuurder geen inbreng meer. Dat gaat dus verder dan FSD Supervised. Het systeem assisteert 'alleen'. Nogmaals: dit betekent dat je als bestuurder altijd verantwoordelijk bent voor wat de auto doet.
:strip_exif()/i/2008150160.jpeg?f=imagemedium)
Het verhogen van de snelheid is jouw verantwoordelijkheid; jij hebt de controle, legt de RDW uit. FSD Supervised moet daarom regelmatig laten zien dat de gebruiker ervoor heeft gekozen om een hogere maximale snelheid toe te staan, om de bestuurder er zo aan te herinneren. Wat dat betreft kun je het vergelijken met cruisecontrol. Dat is er ook alleen om je te ondersteunen. FSD moet je dan ook eerder zien als een heel uitgebreide cruisecontrol, al vond ik het in de praktijk wat lastig om het ook zo te ervaren. Ik vond het zó goed, dat ik vergat dat het niet perfect is.
Updates zijn toegestaan, na check van RDW
Want perfect is FSD nog niet. Groene verkeerslichten herkent het niet altijd en ik vond FSD ook iets te veel houden van de linkerbaan. Ik vroeg me dan ook af of Tesla FSD kan updaten, of dat de fabrikant hiervoor weer een nieuw langdurig traject moet starten bij de RDW. Ja, Tesla mag FSD Supervised updaten, was het antwoord van de RDW, maar die updates moet de autoriteit eerst checken.
"Dat is zodat wij weten wat de impact is van de update", legt de RDW uit. "We hebben wel afspraken gemaakt zodat we heel snel kunnen schakelen. Hebben ze een update die de veiligheid verbetert? Dan willen wij wel binnen een week groen licht kunnen geven." Voor grotere updates zou het wel kunnen dat dat groene licht wat langer duurt. Stel dat Tesla alsnog het Mad Max-profiel naar Nederland wil brengen? Dan wil de RDW daar wel heel goed naar kijken. Tesla zegt ook FSD te willen blijven verbeteren met updates, wat het in andere markten al doet.
Nederland als springplank voor de EU
Over andere landen gesproken: Nederland is nog maar het begin voor Tesla FSD. De RDW gaat de Europese Commissie vragen of FSD Supervised ook in de hele EU gebruikt mag worden, waar de lidstaten uiteindelijk over stemmen. Dit is ook de procedure onder dat eerder genoemde artikel 39. Die andere EU-landen kunnen alleen heel andere verkeersborden en wegindelingen hebben. Tesla begrijpt de Nederlandse wegen kennelijk wel, maar snapt FSD ook de Belgische en Duitse wegen, om maar wat te noemen?
De RDW merkt daarbij op dat Tesla FSD Supervised al langer in de gehele EU test en zo 1,8 miljoen kilometers met FSD heeft gereden. Bovendien is het model ook getraind op data van bestuurders in die landen. FSD 'begrijpt' zo wat de lokale wet- en regelgeving is. Als het goed is, moeten die andere landen dus niet het probleem zijn.
Mocht die Europese goedkeuring er komen, dan moet de Commissie de toelating ook omschrijven naar wetgeving. Andere autofabrikanten weten zo dus wat de kaders zijn om FSD toe te staan en kunnen zo hun eigen systemen toepassen, in theorie dan.
:strip_exif()/i/2008150170.jpeg?f=imagemedium)
Wereldwijd gezien blijft FSD vrij uniek. Mercedes-Benz werkt bijvoorbeeld aan een vergelijkbaar systeem, wat Drive Assist Pro heet. Ook dit systeem werkt van A naar B, maar de bestuurder moet het stuur hierbij licht blijven aanraken. Volledig handenvrij is hier dus niet aan de orde. Het idee is dat de bestuurder altijd direct kan ingrijpen als de handen al aan het stuur zitten, legt Mercedes uit.
De tijd zal leren of die aanpak om de handen aan het stuur te houden écht nodig is voor de veiligheid, of dat handenvrij rijden zoals met FSD in de praktijk veilig genoeg is. Mocht FSD Supervised een succes blijken, dan zou het zomaar eens kunnen dat andere autofabrikanten Tesla weer volgen. Dan zou de Amerikaanse autofabrikant de branche opnieuw flink opschudden, zoals het veertien jaar geleden al deed met de Model S.
Redactie: Hayte Hugo • Eindredactie: Marger Verschuur
:strip_icc():strip_exif()/i/2008119518.jpeg?f=fpa_thumb)
:strip_icc():strip_exif()/i/2008085034.jpeg?f=fpa_thumb)
:strip_icc():strip_exif()/i/2008000000.jpeg?f=fpa_thumb)
:strip_icc():strip_exif()/i/2007947422.jpeg?f=fpa_thumb)
:strip_exif()/i/2008220592.jpeg?f=fpa)
:strip_exif()/i/2008150090.jpeg?f=fpa)
:strip_exif()/i/2002477400.jpeg?f=fpa)
:strip_exif()/i/2008114554.jpeg?f=fpa)
/i/2004609076.png?f=fpa)
:strip_exif()/i/2004648114.jpeg?f=fpa)
/i/2007999796.png?f=fpa)
/i/2004609814.png?f=fpa)
/i/2006847410.png?f=fpa)
:strip_exif()/i/2005423930.jpeg?f=fpa)
:strip_exif()/i/2007572886.jpeg?f=fpa)
:strip_icc():strip_exif()/u/459792/crop5d711255ea9da_cropped.jpeg?f=community)
/u/454010/crop6a65252e18de0_cropped.png?f=community)
:strip_icc():strip_exif()/u/71115/plus222.jpg?f=community)
/u/348138/crop5dde89a7c37c4_cropped.png?f=community)
:strip_exif()/u/119562/gunther.gif?f=community)
:strip_icc():strip_exif()/u/258439/MSN%2520Westy%2520met%2520wiel%2520heel%2520klein.jpg?f=community)
/u/3041/crop651a776a4ad9f_cropped.png?f=community)
/u/75437/crop5daf1210eb5fc.png?f=community)
/u/316174/crop5b26bc86bda66_cropped.png?f=community)
:strip_icc():strip_exif()/u/1912/crop5842b6d1c3a01_cropped.jpeg?f=community)
:strip_icc():strip_exif()/u/345834/crop659102bd4439a_cropped.jpg?f=community)
:strip_icc():strip_exif()/u/172393/crop575c1e0ea6322.jpeg?f=community)
/u/34556/welles60x60.PNG?f=community)
:strip_icc():strip_exif()/u/418364/crop56797208c4b71.jpeg?f=community)
:strip_icc():strip_exif()/u/130601/whatyouwant2.jpg?f=community)
:strip_icc():strip_exif()/u/418248/crop5912e43bef4de_cropped.jpeg?f=community)
/u/58518/crop55c9fb6f4244f_cropped.png?f=community)
/u/357567/crop5dfcfaa04d0e8_cropped.png?f=community)
/u/8/oog3.png?f=community)
:strip_icc():strip_exif()/u/219059/crop5efafd1bd64af_cropped.jpeg?f=community)
/u/93367/crop60a652c165938_cropped.png?f=community)
/u/256640/crop57a32232b96c6.png?f=community)
/u/69484/crop65eb3317e5e80.png?f=community)
/u/27299/hoofd.png?f=community)
:strip_icc():strip_exif()/u/1677928/crop66000a25a1ab3_cropped.jpg?f=community)
:strip_icc():strip_exif()/u/112202/lighthouse.jpg?f=community)
/u/107495/godzilla%252060x60.png?f=community)
/u/284549/crop5c8c1d3ca48d4.png?f=community)
/u/179202/crop699b7c771bf33_cropped.png?f=community)
/u/142011/crop65b383c6c6c2f_cropped.png?f=community)
/u/267471/crop5c90d1e00cf68_cropped.png?f=community)
:strip_exif()/u/284473/crop598caffe294d9.gif?f=community)
/u/1219196/crop6324b2e35d04c_cropped.png?f=community)
:strip_exif()/u/9259/kaars.gif?f=community)
:strip_icc():strip_exif()/u/262645/Waldorf.jpg?f=community)
:strip_exif()/u/44582/fabeltjeskrant.gif?f=community)
:strip_icc():strip_exif()/u/71367/banshee.jpg?f=community)
:strip_icc():strip_exif()/u/204061/crop591d528256d44.jpeg?f=community)
:strip_icc():strip_exif()/u/571219/crop64fbe637a6c6d_cropped.jpg?f=community)
:strip_icc():strip_exif()/u/46692/wiegel.jpg?f=community)
:strip_exif()/u/26425/got1.gif?f=community)