TomTom en Qualcomm hebben aangekondigd te gaan samenwerken aan een project waarin via crowdsourcing technologie van Qualcomm wordt gecombineerd met de wegenkaarten van TomTom. Dit levert volgens de bedrijven een bijdrage aan de ontwikkeling van zelfrijdende auto's.
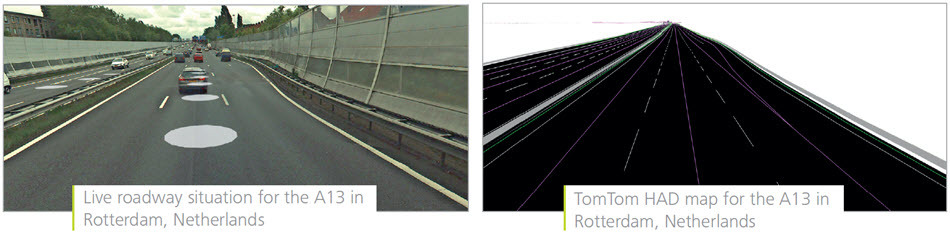
![]() Het gaat om het zogeheten drive data platform van Qualcomm, waarbij de data van verschillende sensoren van voertuigen wordt verzameld en geanalyseerd. Dat stelt voertuigen volgens Qualcomm in staat om betrouwbaar en accuraat de positie te bepalen en de omgeving te herkennen. Deze informatie wordt dan gedeeld met andere voertuigen. TomTom wil deze technologie gaan gebruiken in combinatie met de door het bedrijf ontwikkelde HAD-kaarten, die de omgeving in feite als een 3d-model weergeven, inclusief informatie over bijvoorbeeld het terrein, wegbelijning en eventuele vangrails. Dit moet uiteindelijk leiden tot technologie die zelfrijdende auto's zeer nauwkeurig hun positie laat bepalen en in staat stelt te reageren op het nabije verkeer en de omgeving.
Het gaat om het zogeheten drive data platform van Qualcomm, waarbij de data van verschillende sensoren van voertuigen wordt verzameld en geanalyseerd. Dat stelt voertuigen volgens Qualcomm in staat om betrouwbaar en accuraat de positie te bepalen en de omgeving te herkennen. Deze informatie wordt dan gedeeld met andere voertuigen. TomTom wil deze technologie gaan gebruiken in combinatie met de door het bedrijf ontwikkelde HAD-kaarten, die de omgeving in feite als een 3d-model weergeven, inclusief informatie over bijvoorbeeld het terrein, wegbelijning en eventuele vangrails. Dit moet uiteindelijk leiden tot technologie die zelfrijdende auto's zeer nauwkeurig hun positie laat bepalen en in staat stelt te reageren op het nabije verkeer en de omgeving.
Willem Strijbosch, hoofd van Autonomous Driving bij TomTom, zegt dat TomTom bouwt aan 'een cloud-based platform met behulp van een aantal bronnen, zoals crowdsourced data van connected voertuigen'. Hij stelt dat de samenwerking met Qualcomm de toekomst van zelfrijdende auto's weer een stap dichterbij brengt. Nakul Duggal, onderdirecteur van automotive bij Qualcomm Technologies, zegt dat door de samenwerking met de kaarten en technologie van TomTom een veilige, intelligente en betaalbare oplossing voor autonome voertuigen wordt gecreëerd die ook eenvoudig te integreren is.
TomTom is al langer actief bij technologische ontwikkelingen op het gebied van zelfrijdende auto's. Vorige maand werd bekend dat TomTom het Duitse bedrijf Autonomos heeft overgenomen. Autonomos verleent advies en ontwikkelt zelf technieken op het gebied van zelfrijdende auto's. Het bedrijf is ontstaan uit een onderzoeksgroep van de Vrije Universiteit van Berlijn. TomTom meldde dat het Duitse bedrijf eigen technieken heeft ontwikkeld, zoals software voor autonoom rijdende auto's, 3d-sensoren en manieren om digitale afbeeldingen te verwerken.
De Nederlandse kaartenmaker maakte in 2015 bekend marktleider te willen worden op het gebied van navigatie voor zelfrijdende auto's. Directeur Harold Goddijn claimde toen in een interview dat TomTom een van de weinige bedrijven is die betrouwbare gegevens kunnen leveren die uiteindelijk door autonome voertuigen gebruikt kunnen worden. In 2016 sloot het bedrijf een overeenkomst met Nvidia om software voor zelfrijdende auto's te ontwikkelen. Daarbij gaat het bijvoorbeeld om 'slimme' kaarten, waarmee auto's sneller hun positie kunnen bepalen.

/i/1243859159.png?f=fpa)
/i/1258902225.png?f=fpa)
/i/1235573364.png?f=fpa)
/i/1253024904.png?f=fpa)
/i/1210760958.png?f=fpa)
/u/27299/hoofd.png?f=community)
:strip_icc():strip_exif()/u/27863/325159.jpg?f=community)
/u/175440/crop5b5f0d899a5e8_cropped.png?f=community)
/u/79923/DUT11.png?f=community)
/u/152942/crop687206d7bca78.png?f=community)
/u/112886/crop619386c77cb8c_cropped.png?f=community)
/u/538689/crop5df566c940a40_cropped.png?f=community)
{kind=link}