Leven op Mars?
In kinderverhalen heten aliens veelal Marsmannetjes. Dat heeft een reden: het was enkele eeuwen geleden onder intellectuelen normaal om aan te nemen dat er leven was op Mars. Dat idee, dat Mars leven zou herbergen, heeft zich in ons cultureel erfgoed genesteld en geleid tot tal van films, ufo-verhalen en vermeende observaties van door intelligente wezens gemaakte structuren op het oppervlak van de planeet. Geen wonder dat de drang om de planeet van dichtbij te bekijken altijd groot was, en in juli van 1965 vloog de Mariner 4 van Nasa voor het eerst in een baan om Mars.
De ruimtevoertuigen die in de loop der jaren naar de planeet werden gestuurd, gaven gestaag een duidelijker beeld van Mars: zo bleken de 'kanalen' die eerder met telescopen gezien werden een illusie en ook het bekende 'gezicht' in de regio van Cydonia bleek een hersenspinsel. Wel werd duidelijk dat Mars ooit een dynamische planeet was, met vulkanisme met als toppunt Olympus Mons, de grootste vulkaan in ons zonnestelsel. Nog een enorme structuur, de Valles Marineris, is een kloof die bijna tien maal zo groot is als de Grand Canyon. Deze kloof zou op tekenen van een waterverleden op Mars duiden, net als legio andere geologische structuren.
In recentere jaren werden steeds meer aanwijzingen voor de aanwezigheid van water, al dan niet in het verleden, aangetroffen en waar water is, kan leven zijn. Dat zou het beeld dat Mars niet alleen een rode, maar ook een dode planeet zou zijn, kunnen veranderen.
 Helaas!
Helaas!
De video die je probeert te bekijken is niet langer beschikbaar op Tweakers.net.
Maandagochtend landde de Curiosity op Mars, de meest geavanceerde rover die de mensheid ooit naar de buurplaneet stuurde. Inmiddels is het duidelijk dat Marsmannetjes niet bestaan, maar Curiosity moet wel helpen om antwoord te geven op twee vragen: kunnen we ooit met een bemande missie naar Mars en is er ooit leven op de rode planeet geweest?
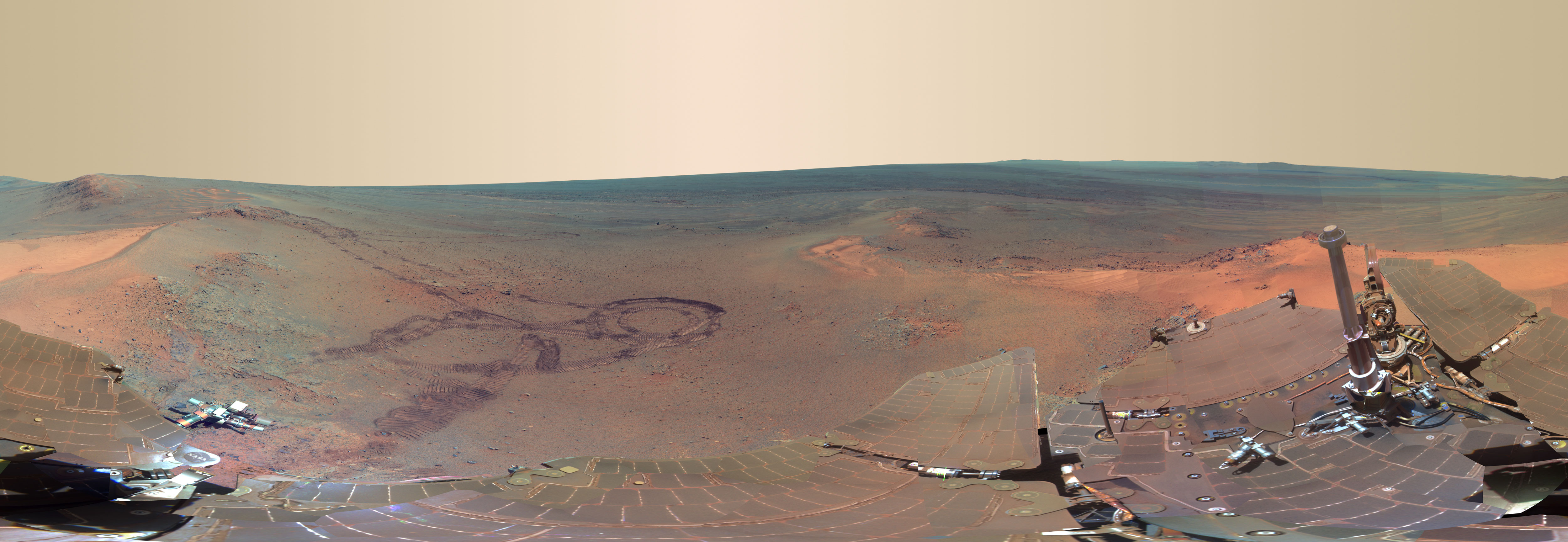
/i/1344010139.jpeg?f=imagenormal "Oppervlak van Mars")
Missies
Het Mars Science Laboratory
Op 26 november 2011 werd het Mars Science Laboratory met aan boord de Curiosity-rover met een Atlas V-raket gelanceerd. De landing vond maandagochtend vroeg plaats, om 7.34 lokale Nederlandse tijd.
De landing bestond uit een aantal stappen, waarbij eerst een groot deel van de snelheid werd gedissipeerd door middel van een hitteschild. De snelheid van de rover en landingshardware werd daarbij gereduceerd van zo'n 5,9km/s tot 470m/s, waarbij kleine aanpassingen aan de koers kunnen worden doorgevoerd met kleine raketjes.
Helaas!
De video die je probeert te bekijken is niet langer beschikbaar op Tweakers.net.
Een parachute deed daarna de snelheid verder afnemen: op een hoogte van ongeveer tien kilometer werd de parachute van 16 meter doorsnede geactiveerd. De parachute bleef het grootste deel van de afdaling actief. De parachute moest de lander tot ongeveer 100m/s afremmen.
Vervolgens werden op een hoogte van ongeveer 1,8 kilometer raketten ontstoken die zorgden voor een gecontroleerde afdaling. Tijdens dit stadium 'ontwaakte' de rover uit zijn vervoerspositie en nam Curiosity zijn landingsconfiguratie aan, waarbij de wielen en wielophanging uitklapten.
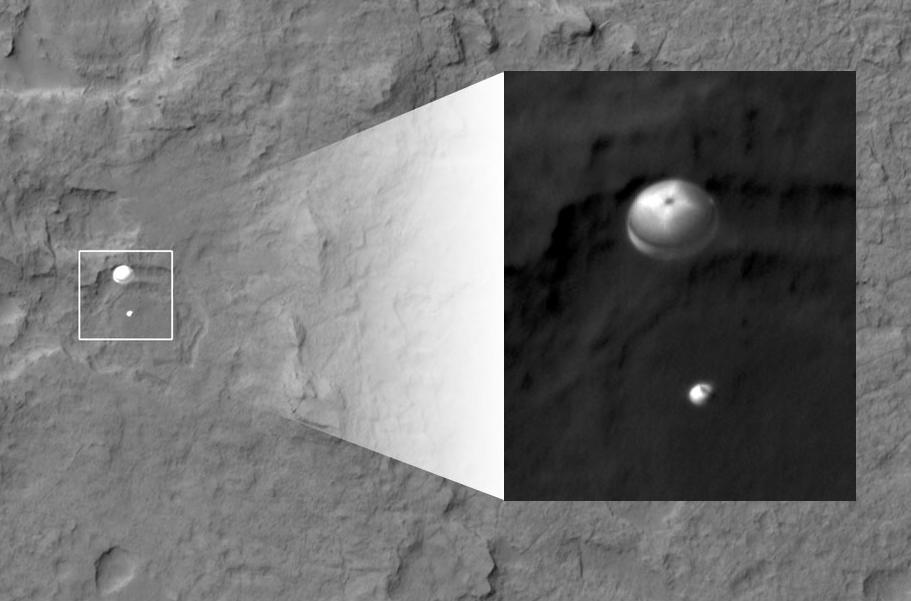
In het laatste stadium werd de zogeheten 'sky crane' ingezet: de Curiosity-rover werd, terwijl hij aan een raketplatform hing met een 7,6 meter lange kabel, langzaam op het oppervlak gezet. De sky crane zelf moest ten minste honderdvijftig meter verderop landen om geen schade toe te brengen aan de rover, die nu geheel functioneel zonder verdere verpakking op het oppervlak moet staan.
De landingsplaats is uitgezocht om zo veilig mogelijk te landen en uiteraard een interessant onderzoeksgebied te vormen. Curiosity heeft daartoe een flinke verzameling instrumenten aan boord.

Missies tot nu toe
Het is uiteraard niet de eerste missie naar Mars. Diverse satellieten en Mars-landers zijn tot nu toe naar de planeet gestuurd, om atmosferisch onderzoek te doen, op het oppervlak te landen en zelfs rond te rijden en onderzoek te doen. De Mariner 'orbiters' waren vrij succesvol in de jaren zestig en zeventig. Ze werden gevolgd door de Vikings, gecombineerde orbiters en landers, rond 1975. Ook de Pathfinder-missie, met de rover Sojourner in 1997, was succesvol.
Enkele mislukkingen zouden volgen: de Mars Polar Lander faalde en ook de Russische poging Mars 96 was onsuccesvol. De Beagle 2 van de ESA was deels een teleurstelling: met de lander kon geen contact worden gemaakt, maar het ruimtevoertuig dat Beagle naar Mars bracht bevestigde de aanwezigheid van waterijs in de poolkap.
Nasa stuurde in 2003 vervolgens MER-A en MER-B naar Mars, die begin 2004 landden. Deze rovers zouden bekend worden als Spirit en Opportunity en de meest succesvolle Mars-missie tot dusver vormen. De rovers werden ontworpen om gesteente en grond op water te onderzoeken en zouden drie maanden operationeel zijn. Spirit hield het echter ruim zes jaar uit en Opportunity is nog altijd operationeel.
De Mars Exploration Rovers Spirit en Opportunity, werden gevolgd door de Phoenix Lander, waarmee na een succesvolle missie in november 2008 geen contact meer kon worden gelegd.

Curiosity: de hardware
De Curiosity-rover heeft een massa van negenhonderd kilo, net zo veel als een kleine auto dus. Dat is de Curiosity dan ook zo ongeveer: de rover is drie meter lang, 2,7 meter breed en 2,2 meter hoog. Een robotarm aan de voorkant heeft ook nog eens een lengte van 2,2 meter. De arm, met drie scharnierpunten, wordt gebruikt om het instrumentarium in de 'hand' naar interessante grondsamples brengen.
Helaas!
De video die je probeert te bekijken is niet langer beschikbaar op Tweakers.net.
De wielen, zes stuks met een diameter van vijftig centimeter, zijn individueel van motoren voorzien en zorgen voor een topsnelheid van 144 meter per uur. In de praktijk, met autonome navigatie, zal dit echter ongeveer 90 meter per uur zijn en met obstakels meegerekend niet meer dan 30 meter per uur. Obstakels kunnen dankzij de vier stuurwielen, twee voor en achter, en variabele hoogte van de ophanging, bedwongen worden.

Hardware
De belangrijkste hardware aan boord van de Curiosity-rover is uiteraard zijn computer. De rover moet immers grotendeels zelfstandig zijn werk doen, simpelweg omdat de afstand tot Mars te groot is om de robot aan te sturen.
De Rover Compute Element, of RCE, bestaat uit redundant uitgevoerde computers die tegen straling zijn beschermd. De hardware is opgebouwd uit een RAD750-cpu, die is gebaseerd op een IBM PowerPC-processor. De 10,4 miljoen transistors worden op maximaal 150nm geproduceerd. De cpu heeft een kloksnelheid tot 200MHz en kan 400mips halen. Beide RCE's hebben 256KB eeprom, 256MB ram en 2GB flashgeheugen aan boord.
Voor de communicatie met de Aarde heeft Curiosity een x-band-zender aan boord en voor kortere afstanden, om met de verschillende satellieten die in een baan om Mars bewegen te communiceren, is een uhf-zender aan boord.
De energie om alle hardware aan te drijven wordt geleverd door een rtg, of radio-isotoop thermo-elektrische generator. De warmte die bij het verval van het radioactieve plutonium vrijkomt, wordt omgezet in elektriciteit. De door Boeing gemaakte MMRTG zou ten minste veertien jaar mee moeten gaan en zou 2,5kWh per dag produceren.

Missie
Nu de rover eenmaal is geland, moet Curiosity doen waar de rover voor naar Mars is gestuurd: onderzoek.
Instrumentarium
Hiertoe heeft Curiosity een 'payload' aan boord van zo'n tachtig kilogram aan wetenschappelijke analyse-apparatuur. Drie camera's leggen de omgeving vast, met alle drie een op de KAI-2020 beeldsensor gebaseerde ccd. De sensors hebben 1600 bij 1200 beeldpunten met een pixelgrootte van 7,4µm.
De MSL Mars Descent Imager, of MARDI, legt de afdaling en landing van de lander vast en moet vijf frames per seconde halen, waarbij de details op een pixel worden vastgelegd met anderhalve meter per pixel op een afstand van twee kilometer en 1,5mm per pixel op afstanden van twee meter.
De MastCam is de belangrijkste 'surround'-camera die op een verhoogd statief is geplaatst. In de MastCam zijn twee camera's, een Medium Angle Camera met 34mm brandpuntsafstand en een Narrow Angle Camera met 100mm brandpuntsafstand. Deze camera's kunnen niet alleen foto's nemen met een resolutie van 1600x1200 pixels in 'true color', maar kunnen ook 6fps-video met 1280x720 pixels opnemen.

De MAHLI of Mars Hand Lens Imager zit logischerwijs op het uiteinde van de beweegbare arm en neemt extreme close-up foto's in 1600x1200 pixels. Verschillende filters en verlichting zorgen voor microscopische foto's van bodemsamples.
Curiosity heeft verder tal van sensors en apparatuur aan boord om gedetailleerde analyse van de omgeving mogelijk te maken. Zo zijn er vier spectrometers die bodem- en gas-samples op samenstelling kunnen analyseren. De CheMin bestudeert bodemmonsters met röntgen-apparatuur en SAM kan zowel bodem- als gasmonsters met een massaspectrometer en gaschromatograaf en laser-spectrometer analyseren. Nummer vier, de APXS of alpha-particle X-ray spectrometer, gebruikt radioactieve deeltjes om de chemische samenstelling van samples te bepalen.
Water wordt geïdentificeerd met de 'dynamic albedo of neutrons' of DAN en verder zijn onder meer stralings-detectors, een weerstation en verschillende eenvoudiger sensors aan boord. Simpele camera's zorgen voor detectie van objecten die in het pad van Curiosity liggen en vormen met zes stuks een stereoscopisch beeld van de omgeving voor en achter de rover.
Missie
Curiosity moet onder meer het klimaat van Mars in kaart brengen, maar veel belangrijker is het beantwoorden van de vraag: is er leven op Mars geweest? Daartoe gaat Curiosity op zoek naar sporen van leven, waarbij zowel chemische indicators daarvan als sporen in de bodem worden gezocht.
Ook de zoektocht naar de aanwezigheid van water zal hoge prioriteit krijgen, om zo te helpen plannen voor een eventuele bemande missie naar Mars.


/i/2004696860.png?f=fpa)
/i/1241362271.png?f=fpa)
/i/1344165861.png?f=fpa)
/i/1261474170.png?f=fpa)
/i/1223819623.png?f=fpa)

{kind=link}
{kind=link}
{kind=link}
{kind=link}