Je smartphone bevat een hoop onderdelen die voor een belangrijk deel bepalen hoe blij jij met je telefoon bent. De een vindt de soc, of kort door de bocht 'de processor', het belangrijkst, terwijl voor een ander het juist de accu is of het formaat van het scherm. Als je een selfie met je smartphone maakt, kijk je naar een onderdeel waar we in deze achtergrond op inzoomen. De cameramodule is namelijk een van de vele componenten die van mems gebruikmaken.
Ook je accelerometer, gyroscopen en zelfs je microfoon zijn allemaal mems-devices. Dat zijn onderdelen die elektronica combineren met mechanica: de afkorting staat voor micro-elektromechanische systemen. Ze zijn dus een combinatie van elektronische en mechanische componenten, maar dan vervaardigd op een substraat van (meestal) silicium. De mechanische onderdelen, zoals kleine actuators, membranen en sensoren, zijn met dezelfde lithografische technieken gemaakt als waarmee chips worden gefabriceerd. Daarmee zijn mems een bijzondere groep onderdelen waar we op inzoomen in dit achtergrondverhaal.
Natuurlijk is je smartphone niet de enige plek waar je mems tegenkomt. Bijna iedereen die wel eens een printer in huis heeft gehad, heeft een mems-device in huis. En in je auto kom je ook overal mems-apparaten tegen, van je airbags tot je bandenspanningssensors. Maar misschien wel de mooiste implementatie van mems vind je in een speciaal type projectors, een dlp-projector. De spiegel daarvan bestaat uit miljoenen mini-spiegels die individueel bewogen worden met mems-techniek.
In dit verhaal kijken we naar de productie en de inzet van mems-hardware. Daarbij richten we ons vooral op de meestgebruikte plek waar je mens-onderdelen tegenkomt: je smartphone. Maar we maken natuurlijk ook een uitstapje naar die dlp-projectors, al was het maar wegens de wow-factor.
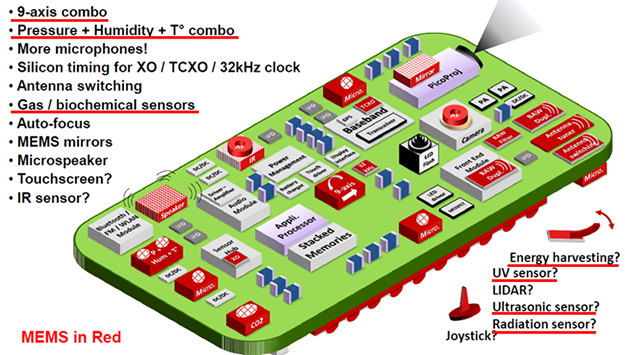
Mems in een telefoon. Bron: LG CNS
Mems in je smartphone
Iedereen heeft vast wel eens gehoord van een accelerometer en gyroscoop. Zo ongeveer elke telefoon sinds 2005 heeft een accelerometer en gyroscoop aan boord: Samsung zou in 2005 de eerste fabrikant zijn geweest met een drieassige accelerometer in de SCH-S310. Dat toestel werd toen aangeprezen omdat je er dankzij de accelerometer mee kon 'schrijven': de sensor mat welke bewegingen je met de telefoon in je hand maakte en vertaalde die in letters.
Accelerometers werken in telefoons meestal samen met een gyroscoop: moderne chips hebben de accelerometer en gyroscoop geïntegreerd in een enkele chip. Waar de accelerometer kan meten hoe snel een beweging over een van de drie asssen verandert, detecteert de gyroscoop de oriëntatie van je toestel. Zo 'weet' je telefoon hoe hij in een driedimensionale wereld georiënteerd is en of er beweging is. Zo kun je dus 'schrijven' met je telefoon, zoals Samsung demonstreerde. Een veel praktischere toepassing van de accelerometer-gyroscoopcombinatie die je ongetwijfeld dagelijks ervaart, is het automatisch wisselen van portret- naar landschapmodus. Ook het snoozen van je alarm of je telefoon op stil zetten door hem om te draaien dank je aan dit duo.
Nu we het toch over vroeger hebben: lang geleden werden telefoons vooral gebruikt om te bellen. En wat heb je daarvoor nodig? Mems. Dit keer is de microfoon waardoor je gesprekspartner je kan horen het mems-apparaat. Een gewone microfoon, zelfs de hele kleine elektreetmicrofoons die ooit in telefoons gebruikt werden, zijn veel te groot voor de moderne smartphone. Daarom wordt een mems-microfoontje gebruikt; die zijn minder dan drie bij twee millimeter groot.
Sommige telefoons hebben ook een barometer aan boord en ook die is met mems-techniek gemaakt. Nog zo'n sensor, die wel weer op vrijwel elke telefoon zit, is het kompas. Sommige fabrikanten, bijvoorbeeld STMicroelectronics, integreren elektronische mems-kompassen in drieassige accelerometers. Accelerometers met gyroscopen of kompassen worden ook in andere persoonlijke elektronica gebruikt, zoals in smartwatches, fitnesstrackers, stappentellers en valdetectors voor ouderen.
Je camera, tegenwoordig keurig verpakt in een mooie module met alle onderdelen netjes geïntegreerd, is ook een staaltje mems-techniek. Waar oude telefooncamera's vaste lenzen en fixed focus hadden, bevat zo'n moderne module een complex systeem van lenzen, autofocus- en beeldstabilisatiehardware, een geavanceerde beeldprocessor en natuurlijk de sensor. En dat allemaal in een module van nog geen kubieke centimeter. En omdat de handen van bijna iedereen een heel klein beetje trillen, is een beeldstabilisatie nodig om scherpe foto's te maken.
Voor optische beeldstabilisatie wordt een aparte, in de module geïntegreerde gyroscoop gebruikt, die een ander subsysteem vertelt hoe de lens bewogen moet worden. Die lens wordt dan door een spreekspoelmodule over twee assen bewogen om de bewegingen van de gebruiker te compenseren. Er is zelfs een fabrikant van mems-technologie die de beeldsensor in plaats van de lenzen laat bewegen. Dat moet preciezere controle over de bewegingscompensatie geven en zou ook nog eens sneller én zuiniger zijn dan de lens met spreekspoelen bewegen.
Ook vingerafdruksensors kunnen met mems gemaakt worden, al zijn de ultrasone sensors van Qualcomm, de 3D Sonic-sensors, met tft-technologie gemaakt. Nog een laatste toepassing van mems in smartphones vind je in het antennedeel. De radiosignalen moeten gefilterd worden en in plaats van analoge componenten als inductors en condensators te gebruiken, worden daar mems-filters voor gebruikt. Die zogeheten fbar-filters zijn zeer klein en vooral heel selectief voor bepaalde frequenties, zodat signalen heel precies kunnen worden gefilterd.
Hoe maak je mems?
Mechanische onderdelen maken is vaak een tijdrovend en vooral arbeidsintensieve aangelegenheid. Dat levert niet alleen hoge prijzen voor fijnmechanische onderdelen op, maar stelt ook een grens aan de dimensies: fysiek gemanipuleerde onderdelen kunnen maar zo klein worden voor ze niet meer in elkaar te zetten, of te produceren, zijn. Stel je een telefoon voor met een hand- of machinegebouwd apparaat voor elke sensor. De afmetingen en prijzen zouden veel te hoog worden.
Daar bieden mems een oplossing voor, want niet alleen kunnen mems-apparaten extreem klein gemaakt worden, ze kunnen ook nog eens met duizenden tegelijk worden gemaakt. We haalden al even aan dat mems vergelijkbare lithografische technieken voor de productie vragen als de chipindustrie. Dat maakt het mogelijk om dankzij schaalvergroting de individuele mems-devices extreem klein én goedkoop te maken. Daarom heeft elke smartphone tegenwoordig een sloot sensors aan boord, anders zouden ze nog duurder zijn, minder compact zijn of minder sensoren aan boord hebben.
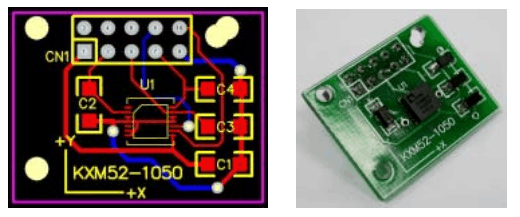
Om de productie van een mems-apparaat te illustreren, kijken we naar een accelerometer. Zoals de naam aangeeft, meet die een verandering van snelheid. Dat doet een accelerometer in de regel met een massa aan een verend element. De beweging van het systeem waarin de accelerometer zit, laat die geveerde massa bewegen. Door de beweging van die massa te meten, kun je de beweging van het grote systeem afleiden. Denk aan een gewicht aan een veer: als je daartegen stoot, beweegt het gewicht en wordt de veer langer en korter.
Bij een mems-accelerometer is de massa een stukje silicium dat niet is weggeëtst tijdens productie. De veer is een condensator, maar dan van twee 'kammen' in het silicium gemaakt. De massa zit aan het uiteinde van die kammen en de twee (of meer) kammen zijn elektrisch van elkaar gescheiden. Omdat die kammen, ofwel de platen van de condensator, dankzij de lithografische productie heel dicht bij elkaar kunnen zitten, zorgt een heel kleine beweging ervoor dat de 'vingers' van de kam dichter bij of verder van elkaar bewegen. Dat zorgt voor een klein, maar meetbaar verschil in lading in de condensator. Zo wordt beweging dankzij de mechanische eigenschappen van de opstelling omgezet in een elektrisch signaal. Door de inputs van drie van dergelijke condensatorsystemen, een voor elke as, aan een microcontroller te voeren, kan de beweging in 3d bepaald worden.
Mems-accelerometer (de LIS331DLH uit een iPhone 4). Bron: Memsjournal.com
De productie van dergelijke structuren kan met gewone lithografische processen. Een masker wordt op een lichtgevoelige laag geprojecteerd, die uithardt en het onderliggende silicium beschermt. Het onbeschermde materiaal wordt weggeëtst en zo kan laagje voor laagje een mems-apparaat worden gebouwd. Silicium gebruiken we hier overigens als verzamelnaam voor verschillende siliciumverbindingen, zoals siliciumdioxide of siliciumnitride.
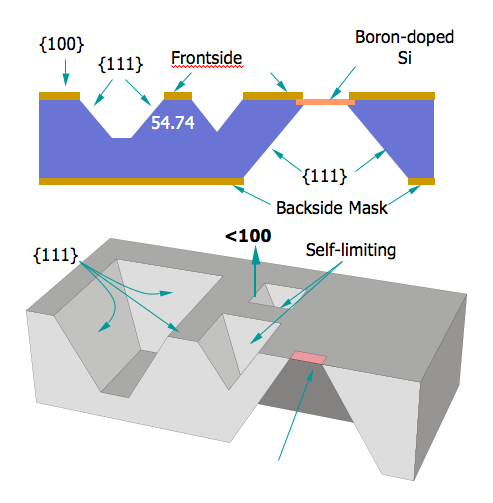
Anisotroop etsen
Voor veel mems-toepassingen moeten vrijliggende elementen gemaakt worden, zogenaamde cantilevers of balken die maar aan één kant vastzitten. Dergelijke structuren kunnen ook met silicium en lithografie gemaakt worden: daarbij is keus tussen isotrope en anisotrope etsmethoden. Bij anisotrope natte etsmethoden wordt silicium selectief met verschillende snelheden in de verticale en horizontale richting weggeëtst. Door de kristalstructuur van silicium wordt het sneller verticaal 'opgegeten' dan horizontaal. Dat levert asymmetrische gaten in piramidevorm op. Door dergelijke gaten te overlappen en op de juiste momenten het etsmiddel weg te spoelen, kunnen deels vrijliggende structuren gemaakt worden.
Om vrij bewegende structuren te maken, bijvoorbeeld een tandwiel voor een motor, of om complexere vingerstructuren voor sensors te maken, kan oppervlaktemicromachining worden ingezet. Daarbij wordt een tijdelijk laagje op het silicium aangebracht, waarbovenop een laagje van het gewenste materiaal wordt opgebracht. Door vervolgens het tijdelijke tussenlaagje op te lossen, blijft het stucturele element over. Door een etsmiddel in plasmavorm te gebruiken, kunnen de temperaturen bij productie laag genoeg blijven om elektronische schakelingen direct in het onderliggende silicium te gebruiken.
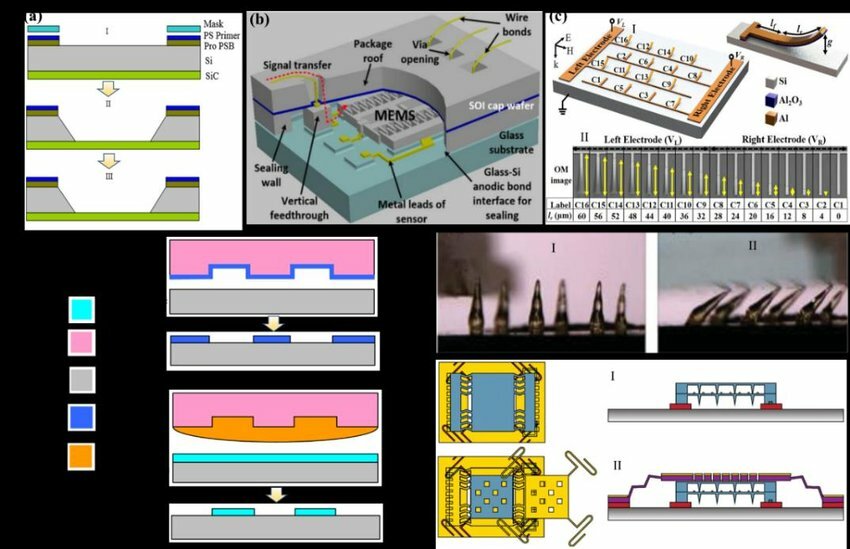
Stappen voor mems-productie
Er zijn nog tal van andere productietechnieken, die allemaal specifieke eigenschappen mogelijk moeten maken. Zo zijn er technieken om in plaats van de beschreven piramidevormige etsgaten juist hele diepe gaten te maken met opeenvolgende etsstappen. Dat kan ook met een plastic waarin een vorm wordt geëtst, waarna metaal in de holte wordt gegalvaniseerd. Natuurlijk kunnen ook meerdere dies met elkaar verbonden worden, zodat de eigenschappen en structuren van verschillende dies met elkaar gecombineerd kunnen worden.
Tot slot
We hadden je de mooiste mems-implementatie beloofd: een dlp-chip. Dat is misschien niet het meestvoorkomende mems-apparaat in smartphones, maar toch zijn er stiekem wel een paar telefoons met zo'n dlp-projector ingebouwd. De bekendste is, of was eigenlijk, de Galaxy Beam-serie van Samsung. Ook Motorola had in de tijd van de Moto Mods-accessoires een dlp-projector; die was niet in de telefoon geïntegreerd, maar achter op de smartphone te klikken.
Texas Instruments is de belangrijkste producent van dlp-chips en DLP is een merk van TI: soortgelijke chips moeten bijvoorbeeld digital micromirror devices, ofwel dmd's, genoemd worden. Elke pixel, waarvan er bijvoorbeeld in de full-hd-DLP4500-chip ruim een miljoen zitten, wordt individueel door een aluminium spiegeltje gevormd. Zo'n spiegelpixel is ongeveer 7,6 micrometer per zijde groot en kan onder een hoek van 24 graden bewogen worden. Die beweging wordt door twee elektrodes geregeld: de spiegel scharniert op een centraal punt en beweegt 12 graden de ene kant op voor een heldere pixel, en 12 graden de andere kant op voor een donkere pixel.
Texas Instruments DLP3010 dlp-chip
Onder de elektrodes zitten sram-cellen om de staat van elke pixel op te slaan. Het geheel wordt aangestuurd door onboardlogica en de spiegels en bijbehorende elektrodes zijn via mems boven op de sram-laag geproduceerd. Om de spiegels, scharnieren en elektrodes te vervaardigen, zijn ten minste zes maskers nodig met bijbehorende lithografiestappen als etsen en opdampen van metaal. Met meer dan een miljoen bewegende onderdelen op één chip zijn dlp-chips waarschijnlijk de meest complexe, en misschien de mooiste, voorbeelden van mems-techniek. En mocht je nou liever een 3d-printer dan een projector hebben, dan hebben we goed nieuws voor je: in dlp-printers wordt zo'n chip ook gebruikt.
We gaven het al even aan: mems zitten volop in je smartphone, maar ook daarbuiten heb je meer mems-apparaten dan je denkt. De printkop van een inktjetprinter is een mems-device, zo ongeveer elke microfoon in apparaten is een mems-microfoon en dikke kans dat je tws-oortjes een mems-speaker aan boord hebben. In de auto gaan je airbags (niet) af dankzij mems-accelerometers en krijg je een waarschuwing voor te lage bandenspanning dankzij mems-druksensoren. De techniek wordt ook in tal van medische en andere specialistische toepassingen gebruikt, maar ook als eindgebruiker maak je dagelijks gebruik van deze onzichtbare microtechniek.
De mems-markt is dan ook booming: de prognoses voor groei variëren van ongeveer negen procent tot achttien procent per jaar. Daarbij wordt de omzet in mems-technologie geschat op ongeveer 80 miljard dit jaar, met groei naar 180 miljard over een kleine tien jaar. De sensormarkt, de sensors die je in onder meer smartphones tegenkomt dus, zal nog harder groeien, met 18 procent van pakweg 14 miljard dollar dit jaar naar 75 miljard dollar in 2032. Steeds meer apparaten krijgen immers sensoren aan boord en extreem zuinige iot-hardware krijgt natuurlijk kleine, goedkope en zuinige mems-sensoren aan boord. Zo krijgen slimme steden sensornetwerken van iot-devices met mems-sensoren aan boord, worden auto's nog slimmer en worden steeds meer sensoren in vrijwel elke tak van industrie, van voedselproductie tot transport, gebruikt.
En dan hebben we het nog niet over nano-elektromechanische systemen, ofwel nems, gehad: die zijn nog kleiner, al is het onderscheid wat vaag tussen beide. Onderzoekers zijn bovendien bezig met moleculaire nanomachines, die nóg kleiner moeten worden. Kortom: er is een grote toekomst voor die kleine mems weggelegd.
Waar de accelerometer kan meten hoe snel een beweging over een van de drie asssen verandert, detecteert de gyroscoop de oriëntatie van je toestel.
Dit is precies verkeerd om..! Een accelerometer maakt gebruik van de zwaartekrachtsvector om de oriëntatie van het apparaat te bepalen. De zwaartekrachtsvector wijst namelijk altijd naar beneden, dus oriëntatie kan ten opzichte daarvan berekend worden.
Een gyroscoop meet juist hoeksnelheden, d.w.z. hoe snel je de oriëntatie van het apparaat verandert. Hoewel hoeksnelheid in principe wel met accelerometer-data bepaald kan worden door de afgeleide van de oriëntatie te nemen (hoeksnelheid is immers verandering van de hoek over de tijd) is het signaal aan ruis onderhevig en heeft het de voorkeur om hier dus een gyroscoop voor te gebruiken, omdat deze direct de hoeksnelheden meet waardoor de ruis beperkt blijft.
De informatie van beide sensoren (en vaak ook nog een kompas, anders weet je niets over de derde (absolute) oriëntatierichting ('yaw' in het Engels)) wordt overigens wel gecombineerd om tot een meer betrouwbare meting te komen, omdat elke individuele sensor zwakheden heeft die de ander dan weer niet heeft. Kijk hiervoor bijvoorbeeld eens naar Kalmanfilters.
[Reactie gewijzigd door beukenootjes op 24 juli 2024 22:04]
De accelerometer maakt geen gebruik van de zwaartekracht vector, het is er alleen een onderdeel an je meeting. Het meet heel simpel gewoon versnelling in een veld.
Heb een eentje de indruk dat voor gyroscoop je alle bij gelijk hebt, het is maar hoe je het bekijkt. Als je eenmaal oriëntatie hebt, dan kan de gyroscope deze bijhouden en dat gebeurt door hoeksnelheden te meten.
Deze mens IMU sensoren hebben wel een drift waar wat lastig mee te werken valt.
Zonder zwaartekracht als referentie weet je letterlijk niet wat boven of onder is! Ja, een accelerometer meet natuurlijk ook andere acceleraties, maar die zijn niet relevant voor de oriëntatiebepaling.
Ik heb de berekeningen voor een onderzoeksproject ooit zelf uit moeten werken, van kalibratie tot en met de vlucht van een drone, dus zou graag horen hoe jij het zonder zwaartekracht denkt te doen .
Wat je zegt over dat de gyroscoop de oriëntatie bij kan houden als hij eenmaal bepaald is, is in theorie misschien leuk maar in de praktijk waardeloos (toevoeging: je hebt overigens wel gelijk dat je in principe op de gyroscoop vertrouwt als het object in kwestie flinke bewegingen en dus acceleraties ondervindt). Ga maar eens die ruizige gyroscoopsignalen integreren, en kijk wat er van je nauwkeurigheid over blijft. Been there, done that... Het is echt een combinatie van beide sensoren.
[Reactie gewijzigd door beukenootjes op 24 juli 2024 22:04]
Enige wat een accelerometer doet is bepalen van versnelling. Op het aard-oppervlak heeft het zwaartekracht-veld van de aarde tot gevolg dat de accelerometer-meter een versnelling zal meten. Daarmee kun je op aarde inderdaad de oriëntatie mee bepalen.
Daarvoor moet je dus in het zwaartekrachtveld van de aarde rekening mee houden, dan wel corrigeren. Strikt gesproken heeft heeft rvt1 gelijk, de accelerometer maakt zelf geen gebruik van de zwaartekracht om oriëntatie te bepalen. Een accelerometer werkt namelijk ook heel goed zonder dat er een zwaartekrachtveld aanwezig is, dan heb je toch echt een gyroscoop nodig waarmee je oriëntatie kunt bepalen.
Oriëntatie in je frame of reference is een definite kwestie.
Maar enkel een gyroscoop kan nooit orientatie bepalen. Een gyroscoop meet alleen hoeksnelheden. En dat met behoorlijk grote offsets als we het over MEMS gyroscopen hebben. Ondertussen wel iets ouder, maar omdat ik die als enige uit mijn hoofd ken: De MPU6050 gyroscoop - accelerometer combi heeft een offset van +/- 20 graden per seconde bij kamertemperatuur. Dus zonder referentie kan dat ding denken dat hij in nog geen 20 seconde om zijn as is gedraaid terwijl hij op tafel ligt.
In het oorspronkelijke artikel klopt het dat technisch gezien de accelerometer de verandering van beweging meet. Praktisch gezien echter wordt de accelerometer gebruikt om te bepalen waar de 'beneden' is, door middel van de zwaartekracht vector. Echter heeft het als nadeel dat alle andere bewegingen ook je resultaat beinvloeden. Kompas sensor bepaald waar het noorden is, met het probleem dat er veel storing op kan zijn door metaal in de omgeving, en er heel veel ruis uit die dingen komt. Maar gemiddeld genomen doen de accelerometer en kompas sensor het wel. Je wil alleen meer dan dat het gemiddeld genomen correct is, en daar komt de gyrocoop bij, die meet de bewegingen en bepaald daarmee alle snelle veranderingen in orientatie, terwijl accelerometer en kompas zorgen dat hij over lange termijn weet wat zijn orientatie is.
En uiteraard heeft een accelerometer ook nog andere toepassingen als puur orientatie bepalen, zoals wanneer je hem als stappenteller gebruikt.
Heb er ook mee mogen werken ivm head tracking. Uiteindelijk zal je altijd moeten kalibreren en het je software vertellen wat boven en onder is en en je sensoren moeten combineren (quaternions) inclusief ook magnetisch veld wat ook weer zo zijn interessante problemen met zich mee brengt.
Het is misschien goed om uit te leggen, dat de zwaartekracht zorgt voor een voortdurende acceleratie richting het middelpunt van de aarde. Alles op aarde is in continue vrije val richting het middelpunt.
Op zich als je een telefoon stil horizontaal op een tafel legt, zou deze over 1 as een versnelling recht maar beneden moeten meten van 9,81ms-2.
Nou willen de meeste gebruikers denk ik een versnelling zien van 0 als ze de telefoon stil houden, dus inderdaad wordt de zwaartekracht dan van de metingen afgetrokken.
Maar voor bijvoorbeeld accelerometers voor airbags valt de zwaartekracht te verwaarlozen en is die correctie, en dus de zwaartekracht, helemaal niet nodig.
En ook voor sattelieten wil je inderdaad helemaal niet die correctie, of toch in ieder geval niet die standaard van 9,81ms-2. Dus het hangt af van de toepassing af lijkt me.
Er zijn tegenwoordig ook MEMS CO2 sensoren.
Deze zijn veel kleiner dan de traditionele CO2 sensoren.
Traditioneel meet een (NDIR) CO2 sensor de absorptie van een specifiek IR licht.
Daarvoor moet je dus dat licht genereren, het een aantal keer laten heen-en-weer kaatsen in een kamertje (voor betere signaal-ruis-verhouding) en dan meten.
Dat heeft ruimte nodig en zo'n licht werd voorheen door een gloeispiraal opgewekt, maar tegenwoordig al een stuk meer efficient door (laser)LEDs.
Een MEMS CO2 sensor genereert een heel klein beetje warmte/licht (black body radiation) en elders in de sensor zit eigenlijk een soort van speakertje en microfoon.
Het idee is namelijk dat er een specifieke resonantie op kan treden die sterk correleert met de CO2 concentratie. Dit werkt volgens het Photoacoustic effect
.
Uiteraard moet dit wel gecompenseerd worden met de temperatuur, maar ook die correlatie is zeer constant en goed reproduceerbaar in massaproductie.
De CO2 sensoren die volgens dit principe gemaakt worden zijn veel kleiner en ook zuiniger. Nu is er met de ontwikkeling van LEDs voor 'traditionele' NDIR CO2 sensoren al een enorme stap gemaakt in energieverbruik. Dus de voorsprong in energieverbruik van MEMS CO2 sensoren is minder indrukwekkend dan toen deze geintroduceerd werden. Evengoed zijn MEMS CO2 sensoren nu zo compact (en zuinig) dat deze in mobiele apparaten gebruikt zouden kunnen worden. Al zijn ze nog wel vrij prijzig.
Een ander interessant gebruik van MEMS wat niet genoemd is, zijn nanoreactoren. Een mooi voorbeeld zijn in situ TEMnanoreactoren.
Elektronenmicroscopen werken met een ultrahoog vacuum, wat zeer beperkend werkt voor de dingen die ermee bekeken kunnen worden. De meeste processen/reacties vinden plaats bij "normale" druk (lees ~1 bar). Deze nanoreactoren kunnen gebruikt worden om in een elektronenmicroscoop toch onder realistische omstandigheden te werken. Hierdoor kan je in realtime kijken naar de veranderingen in de reactor.
Ik ontwikkel al jaren MEMS en vind het jammer dat de "scope" in dit artikel zo beperkt is, met name voor een Plus artikel. De meest fascinerende MEMS-chips bevinden zich bijvoorbeeld niet in een smartphone, maar in de biotech en automotive industrie. Denk bijvoorbeeld aan chips die cellen of organen na kunnen bootsen (organ on a chip), een heel lab kunnen vervangen (lab on a chip), geimplanteerd kunnen worden tegen Parkinson's (electro-mechanical biomedical microservices), vloeistof/gas stroom meten (bijv. micro thermal flow sensors), gascompositie kunnen bepalen, etc.
Al die genoemde chips doen meestal heel wat meer dan je gemiddelde gyroscoop en accelerometer, en de technologie is een stuk minder vanzelfsprekend. Zowel een gyroscoop als een accelerometer zijn in de basis namelijk gewoon een massa-veer systeem met variërende uitleestechnieken (capaciteit, piezo-elektrisch, optisch, etc.).
In mijn voorbeelden zie je bijvoorbeeld vloeistofkanalen en micro-pompen die cellen van elkaar kunnen scheiden, in losse kamertjes plaatsen, belichten, en elektrisch uitlezen. Of chips die de massa van fotonen gebruiken om gewichten in pico- of zelf femtogrammen te kunnen meten. Dat is waar de echte innovatie zich nu bevindt, want de MEMS gyroscoop is de afgelopen jaren nauwelijks verbeterd (op enkele laboratoria ontwikkelingen na).
Een trilmotor bestaat uit onderdelen die ordegroottes groter zijn, dus ik zou zeggen van niet. Je hebt bijvoorbeeld trilmotoren op basis van excentriek roterende massa's (dus een motortje waar een kleine massa aan is bevestigd die uit balans is t.o.v. de as van de motor). Je hebt ook trilmotoren op basis van voice coils. Dit is de technologie die de wat meer subtiele trilfeedback mogelijk maakt. Ook zo'n voice coil is betrekkelijk groot vergeleken met componenten die middels lithografie vervaardigd worden.
Ik heb hier geen kennis van maar een trilmotor moet relatief belangrijke massa hebben, en een relatief belangrijke kracht hebben om deze in beweging te zetten, anders zal je het niet opmerken.
Typisch een elektromotor met een gewichtje aan, je zou het zelf met de hand kunnen wikkelen.
Simpeler nog kan je een tril motor maken zoals een elektromagnetische / elektromechanische bel
Mems zijn chemisch geproduceerd, net zoals chips, niet met de hand na te maken.
[Reactie gewijzigd door g4wx3 op 24 juli 2024 22:04]
Leuk om eens over de werking van een paar mems te lezen. Nu ben ik ook benieuwd naar de werking de rest, microfoon, antenne filters e.d. Ik snap hoe een gewone microfoon werkt, maar hoe dan in een mem?
De productie van dergelijke structuren kan met gewone lithografische processen. Een masker wordt op een lichtgevoelige laag geprojecteerd, die uithardt en het onderliggende silicium beschermt. Het onbeschermde materiaal wordt weggeëtst en zo kan laagje voor laagje een mems-apparaat worden gebouwd.
Is de vraag wat je als "gewoon" proces definieert, maar het zijn op zijn best grof verwante processen met de gewone.
De opbouw is niet laagje voor laagje, de MEMS bij Bosch waar ik werkte werden de hele 20-40 um hoogte in één stap anisotroop ge-etst.
Het etsen daaronder gebeurt isotroop om de structuren los te krijgen van de oppervlakte.
Interessant artikel en goede uitleg waarvoor uiteraard dank aan Tweakers.
Van het bestaan van mems wist ik wel af maar niet dat deze mems genoemd worden. Qua toepassingen kan ik ook nog wel veel andere voorbeelden noemen. Vele rookmelders werken voor zover ik weet ook met een soort membraam. En eigenlijk kan je voor een deel ook wel stellen dat een speaker de hele grote vorm is van mems het zij dan wel analoog.
Qua smartphones zijn de mems soms wel handig maar werken niet altijd zoals je wilt, vooral van portrait naar een liggend scherm switchen. Zo kan ik nog wel meer situaties voorstellen waarbij je merkt dat mems niet altijd datgene doen wat je wilt.

:strip_exif()/i/2005493120.jpeg?f=imagenormal)
:strip_exif()/i/2005493138.jpeg?f=imagenormal)
:strip_exif()/i/2005493146.jpeg?f=imagenormal)

:strip_exif()/i/1285932065.jpeg?f=fpa)
/i/2001665377.png?f=fpa)
/i/1274010398.png?f=fpa)
/i/1277457231.png?f=fpa)
:strip_exif()/i/2000614778.jpeg?f=fpa)
:strip_exif()/i/1141911653.jpg?f=fpa)
/i/1221753254.png?f=fpa)
/i/1286357140.png?f=fpa)
:strip_exif()/i/1295870878.gif?f=fpa)
/i/1243859159.png?f=fpa)
/i/1167475795.png?f=fpa)
/u/414606/crop61fc2908c41cc_cropped.png?f=community)
:strip_icc():strip_exif()/u/145751/check-in-minion-small2.jpg?f=community)
:strip_exif()/u/2172/crop57acf4ac04e70.gif?f=community)
/u/556757/crop622731aa39782_cropped.png?f=community)
/u/214894/crop5baaa31f9c4ff_cropped.png?f=community)
:strip_icc():strip_exif()/u/246225/tweakers_icoon.jpg?f=community)
:strip_icc():strip_exif()/u/1102075/crop5f55118aa5d1f_cropped.jpeg?f=community)
:strip_icc():strip_exif()/u/335350/crop61a63ee1f224f.jpg?f=community)