Inleiding
De tweejaarlijkse Bridgestone World Solar Challenge in Australië leidt op veel technische universiteiten over de hele wereld tot een sterke competitiedrang. De wil om te winnen met een auto die met behulp van zonne-energie zo snel mogelijk de afstand tussen de noord-Australische stad Darwin en het zuidelijk gelegen Adelaide kan afleggen, is groot.
Dat de race in Nederland en België op extra aandacht kan rekenen, komt doordat de teams uit beide landen al jaren bovengemiddeld goed presteren. Dat geldt in de eerste plaats voor het team uit Delft, dat met de Nuna-auto's al sinds zijn aantreden in 2001 steevast op het podium terechtkomt. Ook de teams uit Twente en Leuven eindigden beide al een keer in de top drie van de Challenger-klasse, waarbij snelheid van belang is.
/i/2000795628.jpeg?f=imagenormal)
In 2013 kwam er een klasse bij, de Cruiser-klasse, waarbij het team van de Universiteit Eindhoven prompt de eerste plaats haalde. Omdat de eisen voor de Cruiser-klasse veel verschillen van die van de Challenger-klasse, nemen we die eerste niet mee in dit achtergrondverhaal. Bij de vorige editie, waarvoor Tweakers een videoreport maakte van de aanloop naar de race, deed de Technische Universiteit Eindhoven het in ieder geval goed.
Wij waren nieuwsgierig naar de drie Challenger-teams en zochten ze op in of in de buurt van hun eigen omgeving. Voor het Twentse team waren we nog op tijd om de auto te aanschouwen in het Fanny Blankers Koen-stadion. Delft en Leuven hadden hun auto's al op transport naar Australië gesteld, maar wat er overblijft na de intensieve voorbereiding laat voldoende sporen na voor een goed gesprek.
De race toen en nu
Voordat we ingaan op de uitdaging waarmee de deelnemende diverse teams zich dit keer geconfronteerd zagen, beschrijven we in het kort de geschiedenis van de World Solar Challenge.
De race werd voor het eerst gehouden in 1987. Het was de opvolger van een door Hans Thostrup bedachte reis van 4052 kilometer dwars door Australië, van Perth naar Sydney. Thostrup, een Deen die zich in de jaren zeventig van de twintigste eeuw steeds bewuster werd van het energieprobleem, bouwde een van de eerste zonnewagens ooit: de Quiet Achiever. Met de door oliemaatschappij BP gesponsorde wagen legde hij de reis in twintig dagen af in december 1982 en januari 1983. De gemiddelde snelheid was slechts 23km/h. Uiteindelijk mondde het succes van de rit uit in de organisatie van de eerste World Solar Challenge in 1987.
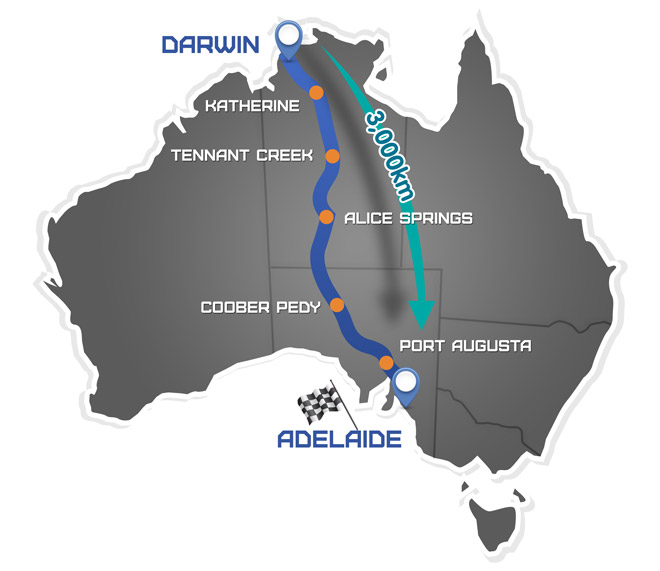
Het parcours van de World Solar Challenge was wel anders dan Thostrups traject, namelijk van Darwin naar Adelaide, waardoor het zonlicht aan beide zijden van de auto invalt. Voor de start in Darwin worden de startposities van de teams bepaald aan de hand van een competitie in die stad. Het doel is steeds zo ver mogelijk te rijden tussen het vertrek om acht uur 's morgens en vijf uur 's middags. Vervolgens kamperen de teams waar ze op dat moment zijn, meestal midden in de woestijn. Voor het vertrek mogen de auto's in de Challenger-klasse vijf kilowattuur aan energie opgeslagen hebben, wat over het algemeen overeenkomt met de maximale capaciteit van de accu. Alle andere energie moet komen van de zon of worden teruggewonnen vanuit overgebleven kinetische energie in de auto. Dat laatste gebeurt meestal door het terugwinnen van de remkracht.
/i/2000806566.jpeg?f=imagenormal) Na de start in Darwin gaat de race over de Stuart Highway naar Port Augusta en dan via Highway 1 naar de finish op Victoria Square in Adelaide, met voor de teams een duik in de fontein op het plein. De snelste auto's worden daar op 21 of 22 oktober verwacht. Tijdens de race zijn de auto's verplicht bij een aantal checkpoints een halfuur te stoppen, een moment waarop coureurs mogen wisselen en routinecontroles uitgevoerd mogen worden, al mag er niet echt gesleuteld worden. Omdat het niet altijd mogelijk zal zijn om exact te stoppen op de plek waar de auto om vijf uur 's middags is, mag er eventueel nog tien minuten doorgereden worden om een geschikte locatie te vinden.
Na de start in Darwin gaat de race over de Stuart Highway naar Port Augusta en dan via Highway 1 naar de finish op Victoria Square in Adelaide, met voor de teams een duik in de fontein op het plein. De snelste auto's worden daar op 21 of 22 oktober verwacht. Tijdens de race zijn de auto's verplicht bij een aantal checkpoints een halfuur te stoppen, een moment waarop coureurs mogen wisselen en routinecontroles uitgevoerd mogen worden, al mag er niet echt gesleuteld worden. Omdat het niet altijd mogelijk zal zijn om exact te stoppen op de plek waar de auto om vijf uur 's middags is, mag er eventueel nog tien minuten doorgereden worden om een geschikte locatie te vinden.
Door de bijna dertigjarige geschiedenis van de race heen, is de gemiddelde snelheid langzaam omhooggegaan van 66,9 naar 102,8km/h in 2005. Sinds dat jaar is de gemiddelde snelheid weer naar beneden gegaan, mede omdat er in in 2007 een maximum werd gesteld aan de oppervlakte van het zonnepaneel: zes vierkante meter. Sinds 2011 mag een paneel van galliumarsenide maximaal drie vierkante meter groot zijn, waardoor er praktisch alleen nog wordt gereden met silicium zonnecellen van maximaal zes vierkante meter.
Al die energie moet omgezet worden in een voorwaartse beweging, maar het betekent niet dat de auto's zo snel mogen als ze kunnen, want ze moeten zich aan de Australische verkeersregels houden, die per staat verschillen. Zo is de maximumsnelheid in het Noordelijk Territorium 130km/h en in Zuid-Australië 110km/h. Dat kan betekenen dat alle auto's uiteindelijk dezelfde snelheid kunnen behalen, maar de organisatie van de WSC past de regels voor elke editie weer aan, waardoor bepaalde handigheidjes niet meer mogen of bepaalde handicaps worden ingevoerd. Zo mag er in deze race tijdens de verplichte stops geen gebruik meer worden gemaakt van zonnepanelen buiten de auto om extra bij te laden. Dat houdt in dat er weer anders en zuiniger met energie moet worden omgegaan dan de vorige keer.
Als laatste zijn er natuurlijk restricties aan de afmetingen. Een wagen mag maximaal 4,50m lang zijn, 1,80m breed en 2,20m hoog. Dat laatste was tot 2007 anders; een auto mocht toen maximaal 1,80m hoog zijn. Binnen die maten moet het gebeuren en sinds 2013 op vier wielen in plaats van minimaal drie.
Aerodynamisch gezien vallen veel vormen al af en omdat het opvangen van zo veel mogelijk zon binnen de afmetingen ook niet onbelangrijk is, lijken de wagens op het eerste gezicht steeds meer op elkaar. In deze editie van de WSC is de asymmetrische vorm populair, waarbij de cockpit of canopy zich in een van de twee zijkanten van de auto bevindt. Alle lagelandenteams hebben nu een asymmetrische auto met de canopy aan de rechterzijkant. Twee jaar geleden was het Nuon Solar Team uit Delft het eerste van de drie die de asymmetrische vorm omarmde. Nu zijn ook het Solar Team Twente en het Punch Powertrain Solar Team uit het Belgische Leuven hierop overgestapt.
De keuze om de canopy aan de rechterkant te plaatsen heeft alles te maken met de stand van de zon en de richting van de race, namelijk van noord naar zuid. Dat maakt de rechterkant wat schaduw-zonverhouding betreft tot de meest logische als er gekeken wordt naar het verschil in zonkracht tussen acht uur 's ochtends en vijf uur 's middags, en de stand van de zon tussen het oosten en het westen.
De wagens bewegen zich voort over het 3021 kilometer lange parcours met een zogenaamde naaf- of in-wheel-motor. De motor gebruikt het merendeel van de opgewekte energie. De energie loopt eerst door een maximum power point tracker, die ervoor zorgt dat de energie uit een zonnepaneel gemaximaliseerd wordt. Elk zonnepaneel heeft een eigen karakteristiek van spanning en stroom, en daaruit is een optimaal vermogen te berekenen. Een mppt zoekt naar het optimale gemiddelde om een zo hoog mogelijke efficiëntie te behalen. Vervolgens laadt het lithium-ion-accupack van maximaal 20 kilogram bij en blijft de motor draaien
Weegt de coureur minder dan tachtig kilo, dan wordt het
verschil aangevuld
Gedurende de tocht zullen verschillende coureurs de auto besturen. Als het goed is weegt de coureur tachtig kilo of minder, want elke kilo is er een. Weegt de coureur minder dan tachtig kilo, dan wordt het verschil aangevuld. Om de zoveel tijd is er een checkpoint waar de auto's moeten stoppen en de coureur even kan uitwaaien, aangezien het onder de canopy behoorlijk warm kan worden; vijftig graden Celsius is geen uitzondering. Veel meer dan sturen hoeft de coureur niet te doen, aangezien alle wagens voorzien zijn van cruisecontrol en een systeem dat gegevens over de hoeveelheid energie in de accu, de rijsnelheid en andere informatie naar de volgauto stuurt. Dat moet ook wel, want alles heeft invloed op de maximale snelheid om een zo groot mogelijke afstand af te kunnen leggen zonder leeg te rijden. Bij bewolking zal de auto anders moeten rijden dan met veel zon.
Hoewel het grootste deel van de energie opgeslokt wordt door de motor, is er ook nog een systeem met een lagere spanning. De energie voor de boordcomputer, communicatie, displays, knoppen en verlichting wordt door een omvormer uit de accu verkregen. Dat de auto's verlichting hebben, zal misschien verbazen, maar dat moet omdat de auto's op de openbare weg rijden en aan bepaalde eisen moeten voldoen.
Dan wordt het zaak om al die eisen in te bouwen in een carrosserie die extreem gestroomlijnd is, nog een reden waarom een asymmetrisch model handig is. Er hoeft dan in het midden geen extra ruimte gemaakt te worden voor de bestuurder; die kan gewoon in de doorlopende wielkast plaatsnemen. Uiteindelijk is de luchtweerstand van de auto's vergelijkbaar met die van een flinke buitenspiegel van een auto. De carrosserie van de zonneauto's bestaat hoofdzakelijk uit een composiet van koolstofvezel en schuim, en verder uit aluminium onderdelen voor zaken als de wielophanging. De drie teams maken allemaal gebruik van zowel beproefde technieken als de modernste varianten.
Solar Team Twente
Het Solar Team Twente presenteerde de Red One op 8 augustus in het Fanny Blankers-Koen-stadion in Hengelo, op een steenworp van de Universiteit Twente, en Tweakers was daarbij. In de schaduw staat, enigszins verdekt opgesteld, de nieuwe Red One met een van de twee coureurs voor deze Challenge erin, nog zonder zonnepanelen en met zo weinig mogelijk van de techniek zichtbaar. Journalisten en crewleden staan om de auto heen. Veel meer dan foto's schieten gaat niet lukken, want niemand laat nog wat los over de zaken die niet zichtbaar zijn en die misschien wel bijdragen aan de kans op de overwinning.
Op het parcours staat de auto uit 2011 van het Twentse team, de 21 Connect. Geïnteresseerden mogen erin zitten en een rondje rijden. De 21 Connect zit best comfortabel, maar dat is schijn, verzekert Jeroen Houwers aan Tweakers, een van de oudgedienden van het Solar Team ons. "Als de kap eroverheen zit, heb je niet veel ruimte meer en je zit ook nog eens vier uur achter elkaar in de brandende zon. Het wordt dan makkelijk vijftig graden onder de kap."
Voordat de auto muisstil over het parcours rijdt, maakt de 21 Connect eerst een hoop herrie. "Dat heeft te maken met de blokspanning. Je merkt ook dat de auto nu nog erg stottert, maar vanaf twaalf kilometer per uur wordt het een keurige sinus en rijdt ie geruisloos." Boven de twaalf kilometer per uur glijdt de wagen inderdaad bijna muisstil over het rode gravel van de atletiekbaan. Het stuur heeft een aantal knopjes, onder andere voor de cruisecontrol en om de informatie op het display te wijzigen van snelheid naar verschillende meetinstrumenten, die vooral met de energievoorziening te maken hebben.
21 Connect uit 2011 zonder zonnepanelen. Carbonstuur met knoppen voor o.a. cruisecontrol en aanpassen informatiedisplay. Wiel en remschijf. Lichtgewicht toeter ;) Red One met bovenkant 21 Connect op de achtergrond.
Hoog tijd om een aantal mensen aan de tand te voelen over de nieuwe wagen en het 2015-team. Twee teamleden, Timothy Teoh en Erwin Mulder, zitten aan tafel samen met Jeroen Houwers, die fungeert als het continuïteitsgeheugen van het team. "Oud-teamleden zijn onmisbaar," zegt Timothy, een van de twee coureurs en in de aanloop naar de Challenge verantwoordelijk voor externe betrekkingen en sponsoring. "De oud-leden zorgen voor begeleiding en Jeroen produceert ook veel. Het stuurtje is nog steeds zijn ding en hij kan bovendien carbon frezen", vervolgt hij. Naast oud-teamleden zijn verschillende bedrijven en instellingen van onschatbare waarde. Timothy denkt dat er geen team is met zoveel partners als het Solar Team Twente.
Op de indrukwekkende lijst sponsors staan heel wat bekende namen. Naast kennis hebben veel bedrijven ook apparatuur waarvan het team anders geen gebruik zou kunnen maken. Overal kan wel iets gemaakt worden. TenCate helpt met geavanceerde composietmaterialen, Fokker bij het lamineren, het Nationaal Lucht- en Ruimtevaartlaboratorium helpt weer met andere specifieke constructies met composietmaterialen en ga zo maar door. Voordat er iets gebouwd kan worden, moet er eerst een ontwerp komen, vervolgens wordt een prototype in elkaar gezet en, minstens zo belangrijk, moet het team zelf opgebouwd worden.
Hoe zit het dan met het gebruik van productietechnieken als 3d-printen? Erwin zegt dat 3d-geprinte onderdelen vaak wat sterkte betreft nog niet opwegen tegen gewalste producten. "De onderdelen zijn al zo klein, dan is 3d printen vaak niet sterk genoeg, maar misschien wel over twee of drie jaar." Jeroen valt hem bij. "Stel dat een bracket breekt doordat het twee gram scheelt als het geprint is; dat is het niet waard. We hebben overigens wel geprinte onderdelen: de plastic boxjes voor de elektronica bijvoorbeeld."
Er zijn verschillende fases, waaronder het ontwerpen, de windtunneltest, het bouwen van het prototype of 'zeepkist' in Twents jargon en de uiteindelijke bouw. Omdat er zoveel verschillende onderdelen gemaakt moeten worden, is coördinatie van levensbelang. "De plekken waar teams bij elkaar komen, noemen we de interfaces", legt Timothy uit. "Het is bijvoorbeeld handig om af te stemmen waar een gat voor de wielophanging moet komen. Daar is de system enigneer voor. Hij coördineert al die groepen, die elk hun eigen belang hebben." Erwin beaamt dat. "Ik had een stuurhuis gemaakt van maar vijftig gram in plaats van honderd, waarna ik met mijn product bij structureel kwam. Kreeg ik te horen dat het niet kon, omdat iets anders dan weer te slap zou worden."
Scrutineeringsdag: opklapsysteem top shell en spiegelsysteem. Testdagen.
Foto's: Jérôme Wassenaar en Gijs Versteeg.
De communicatie is direct en goed. Een geolied team is dan ook belangrijk. Timothy denkt dat het team minstens zo interessant is als de auto. Het hele team bestaat uit negentien mensen en wordt bijgestaan door een paar oud-leden. Als dat goed functioneert, kan er ook meer. "De charme is dat het door studenten gedaan wordt en niemand het ooit eerder deed," zegt Erwin. Jeroen: "Ons niveau is echt heel hoog, zoals dat van Stanford, Michigan, Delft, het team van de Tokai-universiteit uit Japan en het team uit Leuven."
Op donderdag 10 september vertrok de eerste groep van het team naar Australië. De auto zelf was al eerder per container verstuurd. Op 28 september werd de auto gekeurd door de Australian Road Authority en sinds die dag kan er werkelijk op de openbare weg getest worden. Tegelijkertijd werd hier een bijzonderheid geopenbaard: vier sturende wielen in plaats van twee. Met vier sturende wielen is de stuuruitslag kleiner, waardoor de wielkappen smaller kunnen zijn en er toch een draaicirkel van de vereiste zestien meter gehaald kan worden.
Op de 'scrutineeringsdag' op woensdag 14 oktober, vlak voor de race, onthulden de Twentenaren hun echte geheime wapens. Een heet Sabine en voorkomt dat een zonnecel door schaduw een zwakke schakel in het in serie geschakelde systeem wordt. In een video legt het team uit hoe het werkt. De zwakste schakel levert maar 3W, terwijl de andere twee cellen 6W per stuk kunnen leveren. Vanwege de 3W-cel zou er in totaal maximaal slechts 9W geleverd worden. Sabine zorgt ervoor dat beide cellen die 6W leveren, 1W daarvan aan de 3W-cel overhevelen, waardoor de maximale output 3x5 of 15W is in plaats van 3x3 of 9W. Het geheel moet leiden tot een halfuur extra rijtijd.
Het andere geheim zit hem in spiegels. Tijdens de pauzes mag de bovenkant van de auto in de richting van de zon gekanteld worden, zodat er extra snel bijgeladen kan worden. Bij de vorige race mocht er nog twee vierkante meter extra zonnepaneel ingezet worden om bij te laden. Dat mag deze editie niet meer. Om nog meer zonnekracht te kunnen benutten, heeft het team daarom een spiegel gemaakt die precies op het gedeelte tussen de omhoogslaande kap en de buitenzijde van de auto past. Het omhoogslaan van de kap is bedoeld om deze nog beter naar de zon te richten tijdens de pauze. Omdat alle kleine beetjes helpen, moeten de spiegels nog wat extra power opleveren. Sabine komt dan ook van pas; er zullen delen van de arrays zonnecellen zijn waar meer licht op valt dan op de rest. Om dat licht te kunnen gebruiken, wordt het via Sabine gebalanceerd.
Nuon Solar Team
Het oudste team van Nederland, het Nuon Solar Team, doet al mee sinds de zesde World Solar Challenge in 2001. De eerste keer wist het team direct de hoogste plaats op het podium te veroveren, om dat vervolgens nog drie keer achter elkaar te herhalen. Na twee keer een tweede plaats te moeten dulden, werd de vorige race in 2013 weer gewonnen, waarmee het team tot dusver vijf keer de eerste plaats op zijn naam wist te schrijven.
De studenten van het Nuon Solar Team zetelen in een monumentaal naoorlogs laboratoriumgebouw van de TU Delft. Ze zijn samen met het Forumula Student Team de oudste bewoners van de D:Dream Hall, een plek voor allerlei nieuwe ideeën. Het staat voor Delft: Dream Realization of Extremely Advanced Machines. Het Solar Team heeft als oudgediende een kantoor helemaal boven, achter in de grote, basilicale hal. Het werk aan de auto vindt plaats in een van de zijbeuken, waar het team een eigen werkplaats heeft.
Werkplaats. Silicium zonnecel (voor- en achterzijde). 'Concentrators' van Nuna 7 om extra zonlicht te vangen tijdens de pauzes. Lager.
Mark, Jacco en Joris.
Tweakers trof daar een opvallend schone werkplaats, maar dat is niet zo gek. De Nuna 8 is dan net in een container op transport naar Australië gesteld. Naast de auto is ook bijna de hele inhoud van de werkplaats meegegaan, maar dan wel in een speciaal gebouwde flightcase voor alle gereedschap en reserveonderdelen. "We hebben 4000 kilo aan reserveonderdelen mee", zegt Jacco Vos, technisch manager van het project. "En dat terwijl de auto maar 160 kilo weegt."
De auto en alle spullen staan voorafgaand aan de race bij de Nightcliff Primary-school in Darwin, waar het team zo'n anderhalve maand voor de start van de Challenge neerstrijkt om verder te werken aan de auto. Het team is al anderhalf jaar eerder in Nederland opgetuigd. Hoewel het in een pand van de TU Delft huist, is het vrijwel zelfstandig. "De TU Delft is sponsor, net als Nuon", zegt Mark Hupkens, teamleider en verantwoordelijk voor de contacten met grote partners. Hij begon een paar maanden eerder dan de rest, bij de Solar Challenge South Africa. Daar werd het vorige Nuon Solar Team eerste met de Nuna 7. "De Nuna 7 was de eerste auto van ons team met vier wielen, dus zij moesten het eerste concept verzinnen, waarbij veel details nog beter konden", zegt Joris van den Berg, coureur en bezig met de aerodynamica van de auto.
"Het gewicht is naar beneden en de vorm is anders", vervolgt Jacco. "Ook moet je natuurlijk geen stalen bouten en dergelijke gebruiken. We zijn 30kg lichter dan de 7 en zitten nu net onder de 160kg. De buitenkant lijkt hetzelfde, maar details in de ronding van de wielkappen en de canopy heeft tot grote sprongen geleid. De Nuna 8 is negen procent efficiënter."
"Naast de verandering van drie naar vier wielen, was de Nuna 7 ook de eerste asymmetrische auto van het team. We gingen naar vier wielen om stabieler te zijn, maar paradoxaal genoeg werd het instabieler," vult Mark aan. "Deze auto is gelukkig stabieler dan de zeven."
"De regels veranderen elk jaar om innovatief denken te bevorderen, maar ook om trucs in te perken", zegt Jacco. "De Nuna 7 had bijvoorbeeld concentrators, waardoor de twee vierkante meter extra zonnecellen die je mocht meenemen om bij te laden tijdens de pauzes, in feite voor vijf vierkante meter extra energie leverde. Op de scrutiny was iedereen wel verbaasd. Toen probeerden andere teams dat te kopiëren." Wat de truc voor dit jaar wordt, willen de teamleden nog niet kwijt. Het zal pas bij de scrutineering, vlak voor de race duidelijk worden, want dat het belangrijk is om extra bij te laden als er stil gestaan wordt, is wel duidelijk. "Meer energie is harder rijden."
Voor de Nuna 8 nam het team het elektrisch systeem op de schop, waarbij de focus vooral lag op veiligheid, zoals het helemaal laten stilvallen van de auto als er een defect is. Ook zijn andere componenten gebruikt voor verschillende systemen, maar zoals Jacco aangeeft: "Dat zijn typisch dingen die je niet ziet." Het team bouwt de auto voornamelijk zelf. Toch roept het af en toe de hulp in van bedrijven. Zo wordt Sikkens ingeroepen om de laklaag goed af te werken. Het duurt weken om het allemaal goed te plamuren en te lakken, maar uiteindelijk is het ook een visitekaartje voor het bedrijf.
Inladen container in vliegtuig. Scrutineering: verlichtingstest, scharniersysteem en staartvin.
Foto's: Hans-Peter van Velthoven en Nuon Solar Team.
Ook het Nuon Solar Team onthulde al voor de scrutineeringsdag enkele van de belangrijkste wijzigingen ten opzichte van het vorige model. De Nuna 7 uit 2013 was de eerste wagen met vier wielen, waardoor de wielophanging van de voorwielen veranderd moest worden. Daarvoor werd in 2013 een systeem met 'leading' armen gekozen, waarbij de vooruitstekende armen voor de vering zorgen. Het systeem leverde veel ruimte op voor het aerodynamisch ontwerp van de bovenkant of 'top shell', maar het was lastig om er een goede wegligging mee te bereiken. De Nuna 8 maakt dan ook weer gebruik van de traditionele A-armen voor de ophanging. Naast het voordeel dat de wegligging beter is met A-armen en dat ze betrouwbaarder zijn, konden ook de wielkappen smaller gemaakt worden. Dat is weer goed voor de luchtweerstand, die zo'n tien procent lager is dan die van de 7. De achterwielen hoeven niet mee te sturen en maken gebruik van het 'trailing arm'-principe, waardoor er maar weinig ruimte nodig is.
Bij de verplichte keuring voorafgaand aan de race werd ook voor Tweakers duidelijk wat de bij het interview nog verborgen extra's waren. De Nuna 8 bezit een staartvin die op een speciale 3d-printer bij DSM het levenslicht zag. De vin werkt de carosserie van de auto scherp af, iets wat met carbon niet goed kan. Met de holle staartvin van 250 gram wordt de stroomlijn verder geoptimaliseerd. De andere, nog niet eerder onthulde toevoeging is onderdeel van het veiligheidssysteem, namelijk een ingebouwd brandblussysteem voor de accu. De toevoeging werd door de jury 'vol lof' ontvangen. Met de brandblusmogelijkheid van Stat-X weegt de auto wel 250 gram meer, maar wat weegt zwaarder: een auto die in brand vliegt en niet meer te gebruiken is of iets met het gewicht van een pakje boter?
Punch Powertrain Solar Team Leuven
Naast de twee succesvolle Nederlandse teams is er ook het Punch Powertrain Solar Team uit Leuven. Behalve veel overeenkomsten, zijn er ook veel verschillen. Zo heeft het Leuvense team minder tijd dan de Nederlandse teams. De studie kan in België namelijk niet een jaar de ijskast in. Een vertraging is toegestaan, maar niet voor zo'n lange periode.
Het team is het zesde solarteam van de Katholieke Universiteit Leuven en werd opgericht nadat een Leuvense student had meegewerkt aan de Nuna 2 in 2003 van de TU Delft. Deze zou gezegd hebben: 'België moet ook een team hebben!' Het team zit anders in elkaar dan de Nederlandse. Iedereen is in opleiding tot industrieel ingenieur en allen hebben elektronica of elektromechanica als afstudeerrichting. De vorming van het team was nog in handen van het vorige team dat met de Indupol One de zesde plaats behaalde in de WSC van 2013. Na een door het Indupol One-team afgenomen sollicitatieronde, begon het nieuwe team op 1 juli 2014 aan de opdracht een nieuwe zonnewagen te bouwen.
Het team bouwt de wagen in het Innovatie- en incubatiecentrum van de KU Leuven op de campus Arenberg. De locatie van het Solar Team bevindt zich helemaal achterin en bestaat uit een werkplaats beneden en een kantoorruimte boven. Druk is het er niet op vrijdagmiddag, maar dat komt vooral doordat de auto net op transport gesteld is naar Australië. De mallen van de auto zwerven nog door de werkruimte. Hier bouwde de groep van zestien mannen de Punch One, de zesde zonneauto van het team.
Mallen, Dokus en Ruben, Joren
Om de nukken van de verschillende leden zo snel mogelijk te leren kennen, gingen ze naar de Ardennen voor de broodnodige teambuilding. Snel daarna begon de groep met het bedenken van het concept. "Eerst moest besloten worden aan welke klasse we mee wilden doen. Dat werd de Challenger-klasse", zegt Joren de Wilder, verantwoordelijk voor business relations en financiën, en daarnaast piloot. "Het doel is minstens een podium, of winnen natuurlijk. Het motto van het team is: Perfecting performance. Het vorige team had Perfecting reliability als motto. Zij bouwden dus een heel betrouwbare auto en wij gaan voor lichter en nog meer aerodynamisch. Onze ontwerpfase liep tot januari."
Dokus Soetemans, production en mechanical manager, 'doet al het fysieke wat geen elektronica is' en is eveneens piloot. Hij legt uit dat in januari de ontwerpfase stopt, omdat dan het laatste moment voor de aerodynamica gekomen is. "Tussen januari en juni moet alles in de auto gestopt worden, daarna gaan we testen", zegt hij. "En in Australië gaan we zorgen dat ie klaar is", vervolgt Ruben Dhont van de high en low voltage-afdeling van het team. Een aantal mensen van het team gaat al begin september naar Down Under om de race in omgekeerde richting uit te voeren, waarna de rest op dinsdag 15 september afreist naar Darwin.
"Twee jaar geleden is een auto drie dagen in quarantaine geweest; ze zijn daar heel bang voor vreemd ongedierte", vervolgt Dokus. "Transport naar Australië is stressvol. Je hebt standaard drie dagen vertraging. Je moet foto's meesturen van de lading en als dan iets niet klopt in vergelijking met de foto, wordt de hele lading gecontroleerd."
Voordat het allemaal zover is, moet de auto natuurlijk eerst gebouwd worden. Net als de twee Nederlandse teams, bouwden de Belgen een asymmetrische auto, waarbij de cockpit naar de zijkant verhuisde. Een andere grote verandering is dat de auto nu door één motor op een wiel aangedreven wordt. "Dat maakt het iets eenvoudiger; je hebt dan een hoger koppel", legt Dokus uit. "Verder hebben we de hele structuur van de batterij ge-3d-print en tegelijk verbeterd. Nu wordt die bijvoorbeeld minder warm dan de vorige", vult Joren aan.
Punch Powertrain Solar Team voorbereidingen in Australië: aankomst auto. Training op de weg. Ontmoeting met Stella Lux van de TU/e
Foto's: Ward Broeckaert / Punch Powertrain Solar Team.
Al het bouwen is natuurlijk leuk, maar we zitten ook met twee coureurs of 'piloten' aan tafel en er blijkt nog een derde te zijn, maar die is professioneel. "Dit jaar hebben we Bert Longin mee. Hij gaat de kwalificaties rijden en daarna mag hij in de steden of op moeilijke plekken rijden", zegt Joren. "Elke racepiloot is veel beter. Die voelen zo veel beter aan hoe te rijden", zegt Dokus. "Ja, en hij pakte scherpe bochten, kort draaien en al dat soort dingen en de auto blijft daarbij nog helemaal in orde", haakt Ruben in. Het is wel duidelijk; een professionele coureur is heel praktisch om mee te nemen en je leert er ook nog veel van.
Voordat er ook maar een piloot aan de slag kan en voordat alles in Australië is, willen we nog graag weten wie alles nou eigenlijk bouwt. Net als de teams van boven de grote rivieren maken de Leuvenaars gebruik van verschillende bedrijven en hun expertise voor technische ondersteuning. Toch komt het grootste deel van het werk uit de handen van de teamleden zelf, zegt Dokus. "Het nieuwe team doet alles zelf; het oude team laat het een keer zien, daarna doen jullie het verder zelf."
Toch was dat niet het moeilijkste. In verband met de nieuwe regels moet alles nog strakker binnen bepaalde maten passen. De maximale 'box' waarin een auto moet passen, is 4,5x1,8x2,20m. Dat geldt ook voor het extra bijladen tijdens de pauzes. Een paneel van de auto afhalen of een extra paneel erbij leggen mag niet meer. "Dat was misschien wel het lastigste, om de auto in de ruimte van de box te laten passen. Voorheen kon je er gewoon een paneel afhalen, dat kan nu niet meer", besluit Dokus.
De Punch One weegt 185,5 kilogram. Op het moment van schrijven is nog niet bekend wat de 'geheime wapens' van het team zijn.
De auto's in cijfers
De auto's hebben allemaal hun eigen voor- en nadelen. Zo is de ene zwaarder, maar met een hoger rendement en heeft de andere een net iets lagere luchtweerstand. Voor een beter overzicht staan hier de auto's in cijfers naast elkaar, zoals opgegeven door de teams zelf.
| |
Solar Team Twente |
Nuon Solar Team |
Punch Powertrain Solar Team |
| Naam auto |
Red One |
Nuna 8 |
Punch One |
Afmetingen
(l×b×h in mm) |
4500×1800×1100 |
4500×1800×1010 |
4500×1720×1040 |
| Vorm |
Asymmetrisch (canopy rechts) |
Asymmetrisch (canopy rechts) |
Asymmetrisch (canopy rechts) |
| Gewicht |
157kg |
160kg |
185,5kg |
| Zonnepaneel |
6m², silicium zonnecellen, verpakt in beschermend laminaat |
391 monokristallijn silicium zonnecellen |
391 monokristallijn silicium zonnecellen |
| Efficiëntie zonnecellen |
24% |
24% |
24% |
| Motor |
Eigen in-wheel motor |
InWheel Direct Drive Mitsuba-elektromotor, geïntegreerd in velg achterwiel |
InWheel Direct Drive Mitsuba-elektromotor, geïntegreerd in velg achterwiel |
| Efficiëntie motor |
98% |
96% |
>95% |
| Topsnelheid |
138,6km/h |
|
125km/h |
| Accu |
Lithium-ion, 20kg |
Met blusinstallatie Stat-X, ?kg |
20kg |
| Luchtweerstand |
'Evenveel als een zijspiegel van een Ford Transit' |
9% minder dan twee jaar geleden |
'Vergelijkbaar met een uit het raam gestoken hand bij 100km/h' |
| Carrosserie |
|
Sandwich van schuim en koolstofvezel, TeXtreme |
Sandwich van schuim (Roacel) en koolstofvezel, TeXtreme |
| Banden |
Michelin, speciaal ontwikkeld voor zonneauto's |
Michelin, speciaal ontwikkeld voor zonneauto's |
Michelin, speciaal ontwikkeld voor zonneauto's |
| Telemetrie |
Draadloze verbinding volgwagen.
Volgwagen bepaalt snelheid van zonneauto.
|
Draadloze verbinding volgwagen
Volgwagen bepaalt snelheid via applicatie
Boordcomputer met alle data van de wagen
|
Draadloze verbinding volgwagen
Boordcomputer monitort alle parameters
|
| Verbeteringen t.o.v. vorige auto |
5% meer energieopbrengst
Systeem 'Sabine' om in serie geschakelde cellen minder verlies te laten leiden
|
9% minder luchtweerstand dan Nuna 7
Betere drukverdeling door aerodynamica, daardoor betere wegligging, verkregen door 3d-geprinte staartvin
|
30% minder luchtweerstand dan vorige |
| Eerdere resultaten |
2005: 9 (Soltura)
2007: 6 (Twente One)
2009: 8 (21Revolution)
2011: 5 (21Connect)
2013: 3 ( The RED Engine) |
2001: 1 (Nuna 1)
2003: 1 (Nuna 2)
2005: 1 (Nuna 3)
2007: 1 (Nuna 4)
2009: 2 (Nuna 5)
2011: 2 (Nuna 6)
2013: 1 (Nuna 7)
|
2005: 10 (Umicar I)
2007: 2 (Umicar Infinity)
2009: dnf (Umicar Inspire)
2011: 11 (Umicar Imagine)
2013: 6 (Indupol One)
|





:strip_exif()/i/2000795265.jpeg?f=imagegallery)
:strip_exif()/i/2000795266.jpeg?f=imagegallery)
:strip_exif()/i/2000795267.jpeg?f=imagegallery)
:strip_exif()/i/2000795268.jpeg?f=imagegallery)
:strip_exif()/i/2000795273.jpeg?f=imagegallery)

:strip_exif()/i/2000807701.jpeg?f=imagegallery)

:strip_exif()/i/2000807700.jpeg?f=imagegallery)
:strip_exif()/i/2000795286.jpeg?f=imagegallery)
:strip_exif()/i/2000795287.jpeg?f=imagegallery)
:strip_exif()/i/2000795282.jpeg?f=imagegallery)
:strip_exif()/i/2000795283.jpeg?f=imagegallery)
:strip_exif()/i/2000795285.jpeg?f=imagegallery)
:strip_exif()/i/2000795284.jpeg?f=imagegallery)
:strip_exif()/i/2000795288.jpeg?f=imagegallery)
:strip_exif()/i/2000807692.jpeg?f=imagegallery)
:strip_exif()/i/2000807693.jpeg?f=imagegallery)
:strip_exif()/i/2000807695.jpeg?f=imagegallery)
:strip_exif()/i/2000807696.jpeg?f=imagegallery)
:strip_exif()/i/2000807684.jpeg?f=imagegallery)
:strip_exif()/i/2000807687.jpeg?f=imagegallery)
:strip_exif()/i/2000807685.jpeg?f=imagegallery)
:strip_exif()/i/2000807686.jpeg?f=imagegallery)
:strip_exif()/i/2000807689.jpeg?f=imagegallery)
:strip_exif()/i/2000807690.jpeg?f=imagegallery)
:strip_exif()/i/2000807691.jpeg?f=imagegallery)
:strip_exif()/i/2000807709.jpeg?f=imagegallery)
:strip_icc():strip_exif()/i/2004215926.jpeg?f=fpa_thumb)
/i/1353342221.png?f=fpa)
/i/1380714003.png?f=fpa)
/i/1351600707.png?f=fpa)
:strip_icc():strip_exif()/u/81611/headcrop.jpg?f=community)
:strip_icc():strip_exif()/u/63459/crop56eef36b90aba_cropped.jpeg?f=community)
:strip_exif()/u/7013/spunky_main.gif?f=community)
:strip_icc():strip_exif()/u/542515/crop5e897e9f76fc2.jpeg?f=community)
/u/89414/crop601ef6957a87f_cropped.png?f=community)
/u/12967/c5512929c5778c25c9da2378c7dbb01b.png?f=community)
:strip_icc():strip_exif()/u/189840/crop564bd4490e3aa.jpeg?f=community)
:strip_icc():strip_exif()/u/234177/what-carrot.jpg?f=community)
:strip_exif()/u/12754/gif_gifsicle_140_gif_50x50_f91778.gif?f=community)
/u/27299/hoofd.png?f=community)
/u/149203/crop5e8ca87855619_cropped.png?f=community)