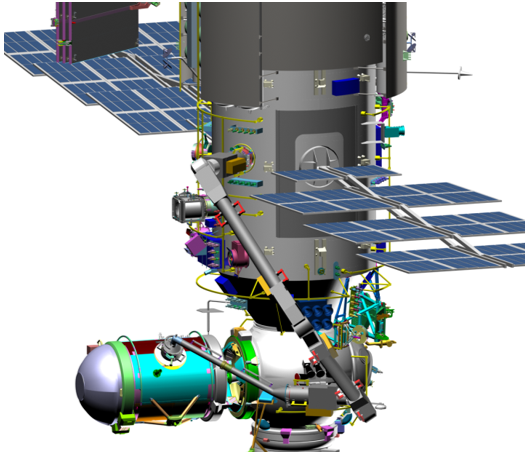
Op woensdagmiddag 21 juli om 16.58 uur wordt het duurste Nederlandse ruimtevaartproject ooit de ruimte ingeschoten. Het gaat om de European Robotic Arm, ofwel ERA. Die is bevestigd op de Nauka-module, een Russisch onderzoekslaboratorium dat aan het internationale ruimtestation ISS gekoppeld zal worden. Een Russische Proton-M-raket lanceert de module en robotarm vanaf het Kosmodroom van Bajkonoer in Kazachstan.
De robotarm is een project van de Europese ruimtevaartorganisatie ESA en is al sinds 1985 in ontwikkeling. ESA's Estec in Noordwijk heeft de afgelopen decennia aan de robotarm gewerkt. Nederland leverde de hoofdaannemer en heeft twee derde van de kosten betaald. In totaal heeft het project zo'n 360 miljoen euro gekost.
Het is nooit het plan geweest om ruim 35 jaar aan de ERA te werken, zegt ESA-projectleider Philippe Schoonejans: "We hebben een enorme serie aan lanceerdata gehad, maar die werd steeds uitgesteld." Waarom heeft het zo lang geduurd voordat de robotarm eindelijk de ruimte in gaat, wat kan die arm precies en heeft het nog wel zin om zo'n oud project de ruimte in te schieten nu het ISS op zijn laatste benen loopt? Daarover spraken we met verschillende betrokkenen.
ERA-projectleider Philippe Schoonejans
Smart spacewalker
De European Robotic Arm is een elf meter lange robotarm, die eruitziet als een passer, met zeven gemotoriseerde gewrichten. In feite zijn het twee armen van ieder vijf meter, met in het midden een ellebooggewricht. De armen zijn ieder voorzien van een pols met drie gewrichten en aan de polsen zit een end effector. Dat is een mechanisme waarmee de arm objecten kan vastpakken en zichzelf kan bevestigen aan het ruimtestation.
Zo kan de ERA zich hand-over-hand verplaatsen over de drie bevestigingspunten op de Russische laboratoriummodule. Ruimtevaartorganisatie ESA noemt de robotarm daarom ook wel 'Smart spacewalker. Met drie bevestigingspunten is de loopvrijheid beperkt, maar de arm kan daardoor wel rondom de Nauka-module manoeuvreren. De robotarm heeft een nauwkeurigheid van 5mm en een handelingssnelheid van maximaal 10cm per seconde.
De robotarm is gemaakt van koolstofvezel en aluminium, en weegt 630kg. In de ruimte kan de ERA objecten met een gewicht tot 8000kg bewegen. Een consortium van Europese bedrijven heeft de arm gebouwd. Dat is gedaan onder leiding van het huidige Airbus Defence and Space Nederland. Dat bedrijf heette eerder Dutch Space en was op zijn beurt een afsplitsing van de Nederlandse vliegtuigfabrikant Fokker.
Op het ISS zijn al verschillende robotarmen aanwezig. De bekendste daarvan is de Canadarm2; een 17,6 meter lange arm die net als de ERA hand-over-hand over het ruimtestation kan bewegen en zo op verschillende punten gepositioneerd kan worden. De Canadarm2 gebruikt andere bevestigingspunten en kan daardoor niet het hele Russische gedeelte van het ISS bereiken. De Japanse Kibō-module is voorzien van een tien meter lange robotarm, maar die zit op een vaste plek.
Een unieke eigenschap van de ERA is dat de robotarm zowel van binnen als van buiten het ISS bediend kan worden. Buiten zit een paneel met knoppen dat speciaal is ontworpen voor bediening door astronauten in een ruimtepak tijdens hun extravehiculaire activiteiten. De andere robotarmen op het ISS kunnen alleen vanuit het ruimtestation bestuurd worden.
Praktijktoepassingen
Als de robotarm samen met de Nauka-module acht dagen na de lancering het ISS bereikt, gaan astronauten er snel mee aan de slag. De ERA zal gebruikt worden om het nieuwe Russische laboratorium af te monteren, maar eerst moet de arm gereed gemaakt worden voor gebruik. Daarvoor zijn vijf ruimtewandelingen nodig, waarbij de arm uitgepakt en in positie gebracht zal worden.
De eerste taken van de ERA zijn het installeren van de luchtsluis en een grote radiator op de Nauka-module. Die zijn eerder al naar het ISS gestuurd. Met de robotarm kunnen aan de buitenkant van het ruimtestation taken worden uitgevoerd die nu door astronauten worden gedaan, bijvoorbeeld inspecties. Dergelijke ruimtewandelingen, of extravehicular activities, zijn risicovol en duren vaak lang. Ook zal de robotarm astronauten assisteren bij eva's, bijvoorbeeld door dienst te doen als een soort hoogwerker en om zware objecten te verplaatsen.
Er is al een aardige periode vooruit gepland, maar de praktijk moet uitwijzen waarvoor de ERA verder wordt ingezet, zegt Schoonejans. "De robotarm is een tool voor algemeen gebruik. De eerste missies weten we, maar verder nog niet. De praktijk met de Canadese robotarm bewijst dat als je zo'n arm eenmaal hebt, je er voortdurend van alles mee doet. Daar maken we ons geen zorgen over."
Het lange ontwikkeltraject heeft verschillende oorzaken; de ERA wisselde meer dan eens van doel en bestemming. Toen het idee voor de robotarm in 1985 ontstond, was het nog onderdeel van de plannen voor het Europese ruimteveer Hermes. Dat zou een kleine variant worden van de Amerikaanse Space Shuttle, maar de plannen hiervoor werden in 1992 geschrapt, onder andere vanwege de hoge kosten. Ook ging ESA destijds een nieuwe samenwerking aan met de Russische ruimtevaartorganisatie Roskosmos, waardoor gebruikgemaakt kon worden van de Sojoez-ruimtecapsule om Europese astronauten te lanceren. De noodzaak van een eigen ruimteveer was er daardoor niet meer.
De Europese shuttle ging niet door, maar de robotarm werd niet geschrapt; er werd een andere toepassing voor bedacht. Vanwege de aangehaalde banden met Roskosmos was het idee in de jaren negentig dat de ERA onderdeel zou worden van een nieuw Russisch ruimtestation: Mir-2. Dat project ging echter ook van de baan.
Rusland sloot zich aan bij de plannen voor het internationale ruimtestation ISS en daarmee kreeg de ERA weer een nieuw thuis. Tussen 1996 en 2005 was het idee dat de robotarm zou worden geplaatst op het Russische Science Power Platform. Dat was een geplande ISS-module van Rusland met eigen zonnepanelen, maar ook die kwam er uiteindelijk niet.
In 2005 werd het huidige plan voor de ERA ingezet; de robotarm wordt aangebracht op de Russische Multipurpose Laboratory Module, een nieuw onderdeel van het ISS, dat ook bekendstaat onder de naam Nauka. De lancering daarvan had al in 2007 moeten plaatsvinden, maar door technische tegenslagen werd dat keer op keer uitgesteld.
Nauka is gemaakt op basis van een reservemodel van de Zarya-module. Dat is de allereerste module van het ISS, die in 1998 werd gelanceerd. De back-up is omgebouwd tot een multifunctioneel laboratorium, maar in 2013 werd ontdekt dat een lekkende brandstofklep de leidingen van het aandrijfsysteem grotendeels had beschadigd. De herstelwerkzaamheden brachten veel kosten met zich mee en hebben jaren geduurd. Vorig jaar gaf Roskosmos groen licht en werd de lancering inclusief de Europese robotarm gepland voor 2021.
Tot voor kort was de lancering nog gepland voor 15 juli, maar dat werd met een week uitgesteld nadat bij de voorbereidingen werd ontdekt dat instrumenten die gebruikt worden om de module in de ruimte naar de definitieve positie te manoeuvreren, niet voorzien waren van een beschermende thermische deken.
Aanpassingen tijdens langdurige opslag
Tijdens het lange wachten op een lancering heeft de robotarm jarenlang in Rusland in de opslag gelegen. Dat gebeurde in een tent gevuld met stikstofgas om hem droog te houden en vochtschade of roest te voorkomen. "Wel moest hij af en toe bewogen worden", vertelt Schoonejans, "Alle mechanismen zijn voorzien van een speciale smering die werkt in vacuüm, maar ook die moet je af en toe bewegen. Elk jaar hebben we wel iets gedaan met de arm. Meestal waren dat geplande tests."
Het project heeft nooit helemaal stilgelegen. Tijdens de lange wachttijd zijn er ook nog aanpassingen gedaan aan de arm. Schoonejans: "Zo'n vijf jaar geleden hadden we een elektronisch probleem met de aansturing. Dat konden we oplossen met nieuwe printplaten met nieuwe elektronica. Dat was best ingewikkeld, want de arm lag toen al in Rusland. Als we dat niet hadden aangepast, had dat problemen kunnen opleveren. Daar hebben we wel geluk mee gehad."
Op wat pcb's na, is de hardware van de arm ongewijzigd. Wel is de software vaak vernieuwd. "We hebben verschillende generaties laptops gehad voor de aansturing vanuit het ISS. In het ruimtestation willen ze niet allerlei verschillende soorten laptops in omloop hebben, dus om de zoveel tijd vernieuwen ze alle exemplaren. Typisch draait de software dan toch niet probleemloos op zo'n nieuwe laptop. Nu zit er in ons budget ook een miljoen euro voor software-updates voor een overgang naar een volgende generatie laptops. Dat gaat een keer gebeuren."
Boordcomputer, software en simulator
Het ontwerp voor de ERA en daarmee ook de technische specificaties, zijn al decennia geleden vastgelegd. De robotarm draait dan ook op antieke hardware. In het Estec in Noordwijk, het technische hart van ESA, geven Lodewijk Aris en Sytze Kampen ons daarover de details. Beiden zijn al tientallen jaren betrokken bij het project. Kampen is hoofd technologie bij Airbus Defence and Space Netherlands en Aris werkt bij Terma BV en is als consultant in dienst bij ESA, waar hij nu werkt aan het plannen van missies met de robotarm. Eerder werkte hij ook bij Airbus aan de ERA.
Microchip TCS695F
De dubbel uitgevoerde boordcomputer van de robotarm zit net onder de schouder. Deze ECC, ofwel ERA Control Computer, is voorzien van een ERC32-processor, die in de jaren negentig is ontworpen door ESA in samenwerking met Temic. De op een 500nm-procedé gemaakte RISC-processor is gebaseerd op de Sparc V7-instructieset, heeft een kloksnelheid van 10MHz, en is voorzien van 1MB Eeprom en 3MB ram.
Temic bestaat al lang niet meer; dat Duitse chipbedrijf werd overgenomen door Atmel, dat vervolgens werd ingelijfd door Microchip. De ERC32 staat nog op de site van die fabrikant onder de noemer TCS695F, maar wordt 'niet aanbevolen' voor nieuwe ontwerpen.
ERA Control Computer
Met de boordcomputer worden de elektromotoren van de robotarm aangestuurd. Bij het uitvoeren van missies worden alle bewegingen en acties van de arm voorgeprogrammeerd. Dat gebeurt vanuit het grondstation op aarde, maar ook met een laptop vanuit het ruimtestation kan de arm bediend en gemonitord worden. "De software voor de bediening vanuit het ISS is een op Linux-gebaseerde grafische interface, die is gemaakt door Spacebel in samenwerking met Airbus", legt Aris uit.
Via de laptop kunnen astronauten in het ISS alle telemetriegegevens van de arm bekijken. Met een 3d-model wordt weergegeven in welke positie de gewrichten staan. De communicatie tussen het ISS en de robotarm verloopt via Mil-STD-1553B, ofwel Milbus. Dat is een van oorsprong militaire seriële standaard, die ook veel in de luchtvaart en ruimtevaart wordt gebruikt.
ERA-software voor bediening vanuit ISS
ERA-telemetriegegevens
Dat de boordcomputer inmiddels decennia oud is, maakt volgens Kampen niet uit. "De computer en software zijn speciaal ontworpen voor de robotarm. Die software doet wat 'ie moet doen. Wat dat betreft is het nog steeds een state of the art machine. We hebben in de afgelopen jaren nog een aantal maal nieuwe software gemaakt om kleine dingen op te lossen die we vonden bij het voorbereiden van missies. De laatste softwareversie is in februari gereviewd en geaccepteerd."
Extern bedieningspaneel
Kampen was in de periode van 1995 tot 2000 verantwoordelijk voor het ontwerp van de arm en heeft goede herinneringen aan het ontwerpen van het bedieningspaneel waarmee de arm van buiten het ISS bestuurd kan worden. "Ik was zelf intensief betrokken bij de discussies met astronauten en het maken van alle verschillende versies. We hadden feedbackdagen waarop ze allerlei dingen zeiden over wat we gepresenteerd hadden. Dan gingen we naar kantoor en bedachten we 's avonds een nieuwe versie."
Dat paneel is dus al lang geleden ontworpen en ziet er ouderwets uit, met grote fysieke schakelaars en enkele basale displays. Als het nu opnieuw ontworpen zou worden, zou het er volgens Kampen echter niet heel anders uitzien. "Je moet het ontwerpen voor de beperkingen van een ruimtepak. Er is een NASA-standaard waarin staat wat wel en niet mag. Zo'n robotarm is een complexe machine, die je met eenvoudige schakelaars en niet al te veel displays moet kunnen bedienen. Er zijn vast meer manieren waarop dat kan, maar je komt altijd op iets uit wat er een beetje lomp uitziet, vanwege de beperkingen en bescherming die het moet hebben."
Extern bedieningspaneel voor de European Robotic Arm
Van supercomputers naar normale pc's
'Computers werden oud en gingen falen; harddisks crashten'Het ERA-project bestaat niet alleen uit een robotarm voor het ISS, maar ook uit een grondstation in Rusland met computers voor het plannen, simuleren en monitoren van de operaties. Hoewel de hardware van de arm grotendeels ongewijzigd bleef, was dat bij het grondstation niet het geval, vertelt projectleider Schoonejans. "De computers die we daar gebruikten, werden oud en gingen falen; harddisks crashten. Zie dan nog maar eens een Sun 20-workstation uit 2003 te kopen. Die bestaan natuurlijk niet meer."
In de loop der jaren is het grondstation dus geregeld voorzien van nieuwe hardware, maar dat had flink wat voeten in de aarde. Schoonejans: "Nieuwe hardware betekent ook een nieuw besturingssysteem en nieuwe applicatiesoftware, vaak was die niet compatibel met de oude hardware. Dat resulteert dan in een sneeuwbaleffect van wijzigingen. Een hoop van de tientallen miljoenen euro's die het uitstel hebben gekost, zit in de upgrades van het grondstation."
Inmiddels is er geen specialistische hardware meer nodig om de software in de grondstations te draaien. Volgens Schoonejans draait dat nu op een netwerk van gewone pc's. "Destijds hadden we Silicon Graphics-supercomputers. Die werden ook gebruikt voor vluchtsimulatoren. SGI bestaat echter niet meer en die supercomputers heb ik al in een museum zien staan. Dat is het enige voordeel van het uitstel; normale computers werden zo snel, dat de supercomputers niet meer super waren. Daardoor hoefden we niet meer het ingewikkelde Russische compliance process te doorlopen om Amerikaanse hardware naar het Russische grondstation te krijgen. Dat was in het begin ongelofelijk ingewikkeld. De Amerikanen waren erg strikt in het leveren van militair bruikbare hardware aan Rusland."
Simulatiefaciliteit
Airbus heeft ook een ERA-simulatiefaciliteit gemaakt: de ESF. Die bestaat uit een kopie van het bedieningspaneel voor de besturing van buiten het ISS en een beamer die een simulatie van de arm in real time op een groot scherm projecteert. Astronauten gebruiken de ESF om te trainen met het gebruik van de robotarm. In Noordwijk en in Rusland staat zo'n ESF.
"De simulatiesoftware die daar draait, is door ons gemaakt en is gebaseerd op EuroSim", vertelt Kampen. "Dat is een softwareplatform voor ruimtevaartprojecten. Fokker, nu Airbus, heeft dat ontworpen in de jaren negentig en dat wordt nog steeds onderhouden."
Net als bij het grondstation moesten de computers voor de simulator geregeld vernieuwd worden en ook dat ging niet zonder slag of stoot. Kampen: "We hadden een probleem met de seriële databusinterface van het ERA-bedieningspaneel. De Milbus-insteekkaart die we bedacht hadden voor de nieuwe computer, werkte niet goed."
ESA-astronaut Samantha Cristoforetti traint met de ESF in Rusland. Foto: ESA / CGTC
Onderhandelen met Roskosmos
De Europese robotarm gaat nu eindelijk naar het ISS, maar het internationale ruimtestation wordt oud en de toekomst is onzeker. In ieder geval tot 2024 is de financiering geregeld en volgens NASA zit het wat de techniek betreft tot 2028 wel goed. "Wat er met het ISS gaat gebeuren, is heel erg een politieke kwestie", zegt Schoonejans. "Een baan om de aarde, de maan en Mars zijn de bestemmingen in de ruimte waar landen nu mee bezig zijn. Misschien moeten we de baan om de aarde wel commercialiseren; daar beheersen we de techniek voor en institutionele gelden kunnen dan naar maan- en Marsprojecten. Daar zijn hoge risico's aan verbonden; daar gaat niemand zomaar in investeren."
Zorgen over de toekomst van het ISS en daarmee de inzetbaarheid van de ERA heeft Schoonejans niet. "Uit alle analyses voor projecten in een baan om de aarde blijkt dat het gebruik van wat je al hebt, de goedkoopste optie is. We zullen dat ISS niet zo snel weggooien. Er zijn wel gesprekken over het in commerciële handen geven in plaats van het te bestieren door ruimtevaartagentschappen. Misschien gaat dat gebeuren, misschien ook niet. Vooralsnog is de financiering elke keer weer met vier jaar verlengd."
De robotarm heeft een geplande levensduur van minimaal tien jaar, maar het zou goed kunnen dat hij veel langer meegaat, zegt Schoonejans. "De meeste systemen voor gebruik in de ruimte overschrijden hun gekwalificeerde levensduur. Kijk maar naar de Marsrovers of de Hubble-telescoop. Als je er zeker van wil zijn dat iets tien jaar meegaat, moet je het ontwerpen voor misschien wel twintig jaar. Als we geluk hebben, werkt de ERA misschien wel twintig jaar. Daar hebben we marge in genomen."
De ERA is een Europees project, maar de robotarm is ontwikkeld voor het Russische deel van het internationale ruimtestation en onderdeel van een deal die door ESA is gemaakt met Roskosmos. "Het eigendomsrecht van de hardware gaat naar de Russen op het moment van de lancering", vertelt Schoonejans. "De deal was dat ESA de arm maakt en daarvoor in ruil astronautentijd en lanceringen met de Sojoez van de Russen krijgt. In de ruimtevaart worden bijna altijd dat soort deals gemaakt."
'De Russen krijgen de broncode niet. We kunnen dus niet zonder elkaar'Ook al wordt de robotarm overgedragen aan de Russische ruimtevaartorganisatie, ESA blijft nauw betrokken bij het project, want de software wordt niet weggegeven. Schoonejans: "De Russen krijgen de broncode niet, we kunnen dus niet zonder elkaar. Als er een probleem is, zijn we daar automatisch bij betrokken. Dat willen we ook, want we willen die arm niet alleen bouwen, maar ook ervaringen in de ruimte opdoen en daar feedback over krijgen."
Bij de eerste missies die met de robotarm uitgevoerd zullen worden, zijn ESA-astronauten Samantha Cristoforetti, Matthias Mauer en Thomas Pesquet betrokken. De Europese ruimtevaartorganisatie kan dus direct praktijkervaring opdoen dankzij het werk van de Italiaanse, Duitse en Franse astronaut. Het toewijzen van Europese astronauten aan de missies gaat in overleg met de Russen en volgens Schoonejans gebeurt dat vaak pas op het laatste moment. "De onderhandelingen over hoe Samantha de airlock gaat oppikken met de robotarm, zijn pas een paar weken geleden gemaakt. De dag daarna begon haar training."
Schoonejans is enthousiast over het feit dat ESA-astronauten direct aan de slag kunnen met de arm. "Dat is echt geweldig; het betekent dat we meteen feedback krijgen over hoe de arm in de praktijk werkt." Over het gebruik van de robotarm door ESA-astronauten in de toekomst zal onderhandeld moeten worden met de Russen, aldus de projectmanager. "We gaan het proberen; we hebben nog niet uitonderhandeld wat onze verplichtingen zijn in de periode van het gebruik. Het is onvermijdelijk dat het up-to-date houden van de software onze verplichting wordt, maar daar kan wel iets tegenover staan."
Dat komt omdat 8000kg een massa is en om die te manipuleren moet je, ook in gewichtloosheid, een kracht uitoefenen. De tweede wet van Newton zegt bijvoorbeeld dat die kracht (in Newton) gelijk is aan de massa (in kg) vermenigvuldigd met de versnelling (in m/s2), dus ook al zweeft het in de ruimte, als je het van richting wil veranderen of wil roteren, moet je een kracht uitoefenen. Vergelijk het met het verplaatsen van een olietanker op zee: een sleepboot hoeft hem niet te tillen, want hij drijft gewoon, maar moet wel een krachtige motor hebben om hem van z'n plaats te krijgen met een redelijke versnelling.
Nu denk ik dat die 8000 kg vooral gekozen is om nog een redelijke acceleratie te krijgen, want de arm zal fysiek vast niet kapot gaan als je er 12 ton mee manipuleert, maar de bewegingen zijn dan bijzonder traag en hij zal de opgelegde verplaatsingen niet (real time) kunnen volgen. En als hij eenmaal in beweging is met 8000 kg aan massa aan z'n uiteinde, wil je ook dat hij in geval van nood weer in redelijke tijd stilstaat.
[Reactie gewijzigd door Grrrrrene op 22 juli 2024 17:54]
En vergeet niet dat als de arm 8 ton in beweging heeft gebracht, de gewrichten en de arm zelf, sterk genoeg moeten zijn om deze massa met versnelling, tegen te houden. Nu kun je de manupileerbare massa wel verhogen als je langzamer beweegt want dan krijgt die massa een kleinere impuls.
hij zal de opgelegde verplaatsingen niet (real time) kunnen volgen
Langzamer bewegen zou toch goed te volgen moeten zijn?
Ja, dat bedoel ik dus: je zult langzamer moeten gaan, steeds langzamer, tot je op een gegeven moment op een onwerkbaar traag systeem komt en dus zit er ergens een arbitraire grens.
Gewicht is een kracht die op een voorwerp met massa wordt uitgeoefend. Massa is een vast gegeven van een voorwerp en verandert niet. Bijvoorbeeld een gewicht met een massa van 1 kg zal op de maan lichter aanvoelen dan op aarde. Dit komt door het verschil van aantrekkingskracht tussen de aarde en de maan.
Het is een van de meest voorkomende fouten die in natuurkunde wordt gemaakt. Het is eigenlijk fout om gewicht in kg uit te drukken omdat het een kracht is. De eenheid Newton zou als vervanger kunnen dienen.
Nee, het is fout om het gewicht te noemen, het is een massa. We gaan immers op een weegschaal staan om onze massa te bepalen, ons gewicht is overal op aarde anders (dichter bij de evenaar ben je lichter op dezelfde weegschaal dan bij de polen).
Klopt, als voorwerp met de zelfde snelheid beweegt als de arm. Als dit ook maar iets afwijkt moet je iets van kracht gaan uitoefenen om het tot "stilstand" te brengen.
Dat iets gewichtsloos is betekend niet dat je er geen kracht op uit hoeft te oefenen om het in beweging te krijgen. De massa van een object bepaald hoe eenvoudig iets te versnellen en te vertragen is. Stel je voor dat de arm oneindig veel massa zou kunnen bewegen en hij pakt een object vast met een veel grotere massa dan het ISS zelf. Dan zou de arm bij het bewegen niet het object maar het ISS bewegen.
Het gaat om de massa (niet te verwarren met gewicht; dat is de kracht die we op aarde waarnemen van een object op aarde tov de zwaartekracht) en de snelheid (momentum) van een object. Een fles water met een massa van 1 kg zal je met evenveel kracht 1k/m per uur in beweging brengen (even (lucht)weerstand wegnemen). Die kracht moeten de gewrichten dan aankunnen.
Lagere snelheid is minder momentum dus minder krachten op de scharnieren als ze van richting willen veranderen en te langzaam is weer lastig aansturen (precisie van motoren).
Het zal dus een optimalisatie zijn (plus een bak marge) dat ze maximaal een object met een massa van 8000 kg kunnen (of durven) te bewegen.
Een lichter object zou de arm dus ook sneller kunnen bewegen.
Een ander voorbeeld; een auto van 500 kilo is makkelijk aan te duwen, maar hoe sneller je die aan het rollen krijgt hoe meer kracht je nodig hebt om deze weer te stoppen.
[Reactie gewijzigd door mjl op 22 juli 2024 17:54]
Toch wel bizar dat een robot arm meer dan 15 of 30 jaar een soort van in ontwikkeling is en SpaceX, Virgin Galactic en Blue Origin in die tijd volledige ruimte voertuigen hebben ontwikkeld.
Klopt, maar dat is niet omdat het zo lang duurde om te ontwikkelen. Het is volledig te wijten aan veranderende planning door projecten die gecancelled werden of uitgesteld. Dat is sowieso een rode draad is de ruimtevaart. Die vertragingen en stopzetten van projecten is ook iets dat je krijgt als projecten door overheden worden uitgevoerd. Vooral internationaal.
Je kunt wat dat betreft NASA en ESA niet vergelijken met SpaceX enzo. Als overheidsinstanties moeten ze steeds bedelen om geld bij mensen die er eigenlijk geen verstand van hebben en in simpele presentaties verteld moet worden dat het 100% gegarandeerd goed gaat werken enzo...(even simpel gezegd). SpaceX, BO en Vigin Galactic/Orbit kunnen zelf hun schema bepalen en hun financiering regelen.
Echter, dat is iets wat velen over het hoofd zien: ook al maken zij nieuwe ruimtevaartuigen, ze profiteren nog steeds van de 70 jaar aan ervaring in raketontwerp/motorenontwerp etc. Bepaalde zaken zijn al heel lang bekend, alleen ontbrak het aan de technologie om het op een zinvolle/efficiënte manier te realiseren. En een NASA of ESA kunnen gewoonweg niet zomaar beginnen aan een avontuur als SpaceX met de Falcon. Dat was al lang gecancelled geweest. Echter, dankzij SpaceX en Blue Origin (en dat is echt hun verdienste) is duidelijk dat een herbruikbare eerste trap geen utopie meer is. Zelfs de capsule wordt nu herbruikt.
Blijkbaar is die arm maar een paar jaar in ontwikkeling geweest en heeft daarna jarenlang (minstens 5?) in opslag gelegen. Maar zelfs met die 5 jaar klopt je opmerking nog...
In mijn jonge jaren (ik ben nu 50) heb ik eens naast dat ding gestaan bij Estec, mooi apparaat ik denk dat ik toen een jaar of 25 was en dat ding was toen al 'af'. Een vriend van me heeft er ook aan gewerkt als tester. Heeft camera's in elke kop zitten voor patroon herkenning zodat hij weet wat hij waar kan aanpakken.
Ik heb in mijn eerste baan bij Stork Product Engineering in Sittard na mijn afstuderen van de HTS de schema's en prototypes van de end-effectors (de "polsen") getekend en helpen ontwerpen...dat is al 26 jaar geleden...toch mooi dat de ERA nu toch uiteindelijk gelanceerd is..eindelijk eer van mijn bijdrage...
MeToo In '96-'97 bij SPE in Sittard de EGSE (Electrical Ground Support Equipment) ontwikkeld, het geautomatiseerde testsysteem. Het kantoor is inmiddels gesloopt zag ik vorige week. Dat ik dit nog mag mee maken
Het zegt met name iets over uit welke periode we komen. Nadat de sovjet unie in elkaar stortte was de ruimterace voorbij. Er was nauwelijks aandacht meer voor ruimtevaart. Elk klein ontwikkelingetje kon je zo 20 jaar op stuk slaan.
Voor mij de belangrijkste reden dat ik niet de ruimtevaart in ben gegaan. Ik heb die arm nog in het echt staan bekijken bij Dutch Space. Toen was het mij wel duidelijk hoe slapend de ruimtevaart was.
Gelukkig (en met name dankzij Musk, Bezos en in mindere mate door China) ziet het er in 2021 heel anders uit! Space is booming!
Hopelijk komt het hier in Europa ook weer een beetje los. Dat is op dit moment mijn grootste zorg. Overal zijn ontwikkelingen, en we lijken hier niet voldoende aan te haken. Dat gaat op lange termijn problemen geven voor onze welvaart.
Ik hoop het wel inderdaad, als we straks afhankelijk zijn (wat we al waren) om dingen de ruimte in te krijgen van andere landen dan mogen we daar dik voor betalen, of achteraan in de rij aansluiten..
Dingen de ruimte in krijgen kunnen we nog steeds. In Europa is er een policy van "independent acces to space". Daar is ESA verantwoordelijk voor. Daarvoor maken ze gebruik van Ariane 5 (straks Ariane6 die in ontwikkeling is) en Vega. (Daarnaast gebruikt de lanceerorganisatie Arianespace ook de Sojouz-raket).
Komt simpelweg door politiek en geld enzo, de Russen hadden hun module ook niet klaar en daar was het ook op wachten. Uiteindelijk heeft deze arm dus jaaaaaren in opslag gelegen waarbij onderhoudt nodig was om het in goede vorm te houden. Ik vind het met name bijzonder dat ze daar geld in zijn blijven stoppen.
Een risc5 processor uit 1990, rare outdated communicatie protocollen. Ik ben verbaasd dat dit nog willen lanceren. Ik snap de 5mm accuracy daaruit wel je moet toch wat compromissen sluiten als je geen processing power hebt. Maar dit is totaal niet toekomst bestendig voor software updates.
Waarom hebben ze tevens een netwerk aan Pc's nodig voor hun simulatie als het vroeger draaide op een supercomputer kan dat gerust op een enkele Xeon of Epyc pc tegenwoordig. Heeft iemand ze ooit op de hoogte gebracht van ROS?
Vergeet niet dat je daar te maken hebt met een enorme straling. Ondanks afscherming moeten de processoren nog het e.e.a. kunnen verdragen wat dat betreft. Er zijn dus zogenaamde Rad-Hard processoren toegepast. In die tijd was er slechts een type beschikbaar wat aan de specificaties voldeed. Dit heeft alles te maken met hoever je kan gaan qua miniaturisering qua halfgeleider technologie. Het gevolg is dat de processoren die gekozen worden vaak een of meer generaties achterlopen. Van wat er op het moment van keuze/selectie state-of-the-art is. In die tijd was die processor van zo'n 3 generaties eerder van wat er op de grond toen werd toegepast.
Iets vergelijkbaars is aan de orde voor databussen. Die moeten ook gekwalificeerd zijn voor de ruige omgeving van de ruimte. Er is mil-1553 gekozen, een avionics bus uit gevechtsvliegtuigen, wat nog op heel veel van die vliegtuigen gebruikt wordt. Het is super robuust wat essentieel is voor de besturingssystemen.
Een netwerk van PCs wordt toegepast vanwege flexibiliteit in deployment en gebruik van de software.We praten toen over een SGI in een netwerk met SUN workstations. Dat is vervangen door een netwerk van PCs met NVIDIA kaarten. Maar die mid-life update is inmiddels ook alweer al weer lange tijd geleden. Tegenwoordig kan het inderdaad nog compacter, maar heb je nog wel de nodige werkplekken.
Dank voor informatieve antwoord op mijn vraagstukken! Ik vraag me echter nog steeds af of het niet handiger zou zijn om de gehele software opnieuw te herschrijven voor moderne hardware. Alle wiskunde zou 1 op 1 over te nemen moeten zijn in een modernere taal. Nu moeten ze voortbouwen op hardware welk al legacy is bij het lanceren van het project.
In principe kan dat. Maar er is geen enkele aanleiding toe om dat te doen. Die hardware zoals die indertijd gekozen en/of gemaakt is gaat niet veranderen. Dat zou een peperdure exercitie worden, want het moet allemaal weer gekwalificeerd worden. Vooral omdat dit een "safety critical" systeem is, wat hele hoge eisen stelt aan verificatie. Alle "indepedent verirication & validation' activiteiten zouden als regressietest opnieuw gedaan moeten worden, voorafgegaan door e.v.t. aanpassingen van FMECA (Failure mode, effects, and criticality analysis). Daarbij is de software in Ada geschreven wat inherent een hoeveelheid robuustheidsvoorzieningen bevat. Als je dat naar C of C++ gaat omschrijven dan komen er een paar gevaren van de taal (memory handling) aan de orde waar uitbreidingen van het ontwikkelproces en extra tooling nodig zijn om te voorkomen dat die gevaren zich doen gelden.
Er zitten bijvoorbeeld geavanceerde collision avoidance algorithmes in. En die zijn ingewikkelder dan wat je bij een auto of vliegtuig aantreft vanwege het aantal graden van vrijheid waarmee die arm kan bewegen.(Er wordt hierbij o.a. gerekend met de actuele geometrische toestand van het ISS. D.w.z. telkens als er iets veranderd aan het ISS wordt de 3D database bijgewerkt zodat de pad-planningsalgorithmes daarmee kunnen rekenen.
[Reactie gewijzigd door fredst op 22 juli 2024 17:54]
Ik denk dat ook het feit dat het ISS ook al een stuk ouder is het ook niet meer economisch haalbaar is om de hele arm te redesignen nu deze eindelijk de ruimte in gaat mee telt in deze beslissing.
Zelf als tweaker zou je nog even een paar updates aan je build/vintage PC doen voordat je m weer eens aan zet, maar dit is wel even andere koek
Die details zijn een illustratie bij een antwoord op een serieuze vraag.
Het simpele antwoord is dat er totaal geen noodzaak toe is om dit op te waarderen.
[Reactie gewijzigd door fredst op 22 juli 2024 17:54]
1) Staat ook in het artikel dat ze nu 'gewone' hardware gebruiken.
2) Die outdated protocollen maakt helemaal niets uit, TCP en UDP zijn ook oud en dat gebruiken we ook nog steeds en dat lukt prima. Deze protocollen zijn ook vaak heel robust en dat wil je. Als je iets nieuws gaat implementeren voegt dat geen waarde toe, alleen maar extra risico.
3) ROS komt blijkbaar uit 2007... Deze arm bestond al veel eerder, geen iedee of ROS approved is voor space.... Maar dat is precies weer zo'n dingetje waarom zou je dat willen doen als het al geïmplementeerd is?
Ik las dat de pc's op de grond geupdate waren, de robot's boardcomputer niet.
Het is niet heel handig als je een lange termijn ruimte project hebt waarvoor je zeer lastig software moet schrijven omdat alles heel erg geoptimaliseerd moet zijn. Tenzij ze hem op korte termijn willen vervangen.
Het gehele simulatie platform is waarschijnlijk makkelijk vervangbaar met ROS, dan zouden ze gelijk een beetje modern zijn en werkbaar voor anderen ipv met een nutteloos gecompliceerde propriatary eigen standaard gaan werken.
[Reactie gewijzigd door Osiummaster op 22 juli 2024 17:54]
De robotarm heeft een nauwkeurigheid van 5mm en een handelingssnelheid van maximaal 10cm per seconde.
Ik vind de 5 mm helemaal niet nauwkeurig voor zo'n robotarm.
Zeker gezien de wijzigingen die ze hebben uitgevoerd had ik dit ook meegepakt om te verbeteren.
De gewrichten bepalen weliswaar hoeveel de afwijking is (hoek) maar 5mm op een armlengte van 2x 5.5m met minimaal 3 gewrichten die een afwijking veroorzaken is best wel oké. Niet te vergeten de toleranties voor temperatuuruitzetting; grootste deel zal carbonfiber zijn maar reken er maar op dat er ook metaal in zit wat kan krimpen/uitzetten bij de flinke temperatuurverschillen tussen schaduw en direct zonlicht.. denk dat ze t best ok gedaan hebben. Komt bij: wat is de precisie die je nodig hebt/afgesproken? Meer precisie zal invloed hebben op constructie/gewicht/snelheid/kosten/maximale belasting etc. Kosten leken niet zo veel uit te maken maar gewicht is wel een dingetje😉
Sprekend voorbeeld waarom de Europese ruimtevaart zo ongelooflijk achter blijft lopen in tegenstelling tot commerciële partijen zoals o.a. Space-X. In plaats van dat er eens met een commerciële en ondernemende insteek gekeken wordt naar wat er met het Europese overheidsgeld gedaan wordt, is het ene grote politieke discussie, gedirigeerd door mensen die geen snars verstand hebben van ruimtevaart en/ of bijbehorende techniek/ technologie. Zo worden plannen bij elke ESA ministersconferentie aangepast, budgetten opnieuw verdeeld en worden bijvoorbeeld projecten waar al jaren aan gewerkt is en miljoenen Euro's ingestoken zijn, zonder pardon (weer) in de koelkast gezet. Dat is ook precies de reden geweest dat ik mijn baan in de ruimtevaart heb opgezegd en voor ASML ben gaan werken.
Ik heb bij APP gewerkt, waar destijds (2005) mensen vanuit Stork Product Engineering bijgekomen zijn, inclusief al hun space-engineering projecten. Een daarvan was deze ERA. Dit was toen al een 'oud' project waar al jaren niet meer aan gewerkt werd. Dat deze arm nu alsnog wordt gelanceerd vindt ik persoonlijk ongelooflijk. Mijn ervaring is helaas dat ruimtevaartprojecten voor ESA zonder pardon 10+ jaren kunnen duren. Elke agile, lean, prince en andere projectmanagement, - of verbetertool zal je vertellen dat dit killing is voor je budget.
Als je deze arm nu (na 35 jaar) opnieuw zou moeten ontwikkelen, zou dat naar mijn idee vele malen sneller en goedkoper moeten kunnen met betere en snellere 3D-teken, - FEM, - en analysesoftware op hedendaagse CAD stations, gebruik veel geschiktere materialen en productietechnieken, enz. Dus of het inderdaad zo goedkoop is om bestaande hardware te gebruiken (na 35 jaar opslag en onderhoud) vraag ik me af.
Hoe bedoel je dat we chinese hardware gekopieert zouden hebben? Deze arm is al in 1985 bedacht en zou in 2007 operationeel worden. De canadarm2 is ook ouder dan die chinese arm. Verder duid gestolen op dat je hun data/bouwtekeningen/hardware ongevraagd gebruikt, dat is hier zeker niet het geval.
Hmmm...heb je het artikel helemaal gelezen? Want je hebt denk ik niet goed begrepen dat dat ding al in 1985 gemaakt is.
Bovendien moet je voor de gein eens goed kijken naar dat Chinese station. Dat ontwerp doet je vast ergens aan denken: MIR. Zou zomaar kunnen, want de Chinezen werken samen met Roskosmos, dus die bouwtekeningen van het nieuwe Chinese station stammen uit de jaren '60.

:strip_exif()/i/2004482114.jpeg?f=imagegallery)
:strip_exif()/i/2004482058.jpeg?f=imagegallery)
:strip_exif()/i/2004463024.jpeg?f=imagegallery)
:strip_exif()/i/2004463020.jpeg?f=imagegallery)
:strip_exif()/i/2004463014.jpeg?f=imagegallery)
:strip_exif()/i/2004482104.jpeg?f=imagegallery)
:strip_exif()/i/2004482108.jpeg?f=imagegallery)
:strip_exif()/i/2004482106.jpeg?f=imagegallery)



:strip_exif()/i/2004481172.jpeg?f=imagegallery)
:strip_exif()/i/2004481174.jpeg?f=imagegallery)
:strip_exif()/i/2004481176.jpeg?f=imagegallery)
:strip_exif()/i/2004481886.jpeg?f=imagearticlefull)
:strip_exif()/i/2004482092.jpeg?f=imagegallery)
:strip_exif()/i/2004482088.jpeg?f=imagegallery)
:strip_exif()/i/2004482090.jpeg?f=imagegallery)
:strip_exif()/i/2004482086.jpeg?f=imagegallery)
:strip_exif()/i/2004482094.jpeg?f=imagegallery)
:strip_exif()/i/2004482096.jpeg?f=imagegallery)
:strip_icc():strip_exif()/i/2004157192.jpeg?f=fpa_thumb)
/i/1332577912.png?f=fpa)
:strip_exif()/i/2004788520.jpeg?f=fpa)
/i/2000655303.png?f=fpa)
:strip_exif()/i/2004157282.jpeg?f=fpa)
:strip_exif()/i/2004482064.jpeg?f=fpa)
/i/1317819995.png?f=fpa)
/u/627429/crop5eb44cf25060a_cropped.png?f=community)
:strip_exif()/u/7013/spunky_main.gif?f=community)
:strip_exif()/u/47900/baph.gif?f=community)
/u/263454/crop69528a83920d8.png?f=community)
/u/85941/crop61dd9b39bb021_cropped.png?f=community)
/u/1830/acm.png?f=community)
:strip_exif()/u/426754/crop641d7ff3e1dfc_cropped.gif?f=community)
/u/94702/klein.png?f=community)
:strip_exif()/u/267506/crop6737556602b99.gif?f=community)
/u/151149/crop5fde11d32f663_cropped.png?f=community)
:strip_icc():strip_exif()/u/396403/crop5dcc11ba166fe_cropped.jpeg?f=community)
:strip_icc():strip_exif()/u/48499/IMAGE_120.jpg?f=community)