Twee wetenschappers van de Californische Universiteit in Berkeley hebben een robotkakkerlak ontwikkeld die in staat is met andere van zijn soort samen te werken om een trap te beklimmen. De zespotige machine staat bekend onder de naam 'VelociRoach'.
Deze naam staat voor 'Velocity Robotic Autonomous Crawling Hexapod'. De robotinsecten zijn 10cm lang en kunnen zich met elkaar verbinden door middel van een fysieke tether. Daardoor kan een kakkerlak een collega een 6,5cm hoge traptrede opduwen. Als de ene kakkerlak vervolgens boven aangekomen is, trekt hij de andere met een lier omhoog terwijl hij zichzelf vasthoudt.
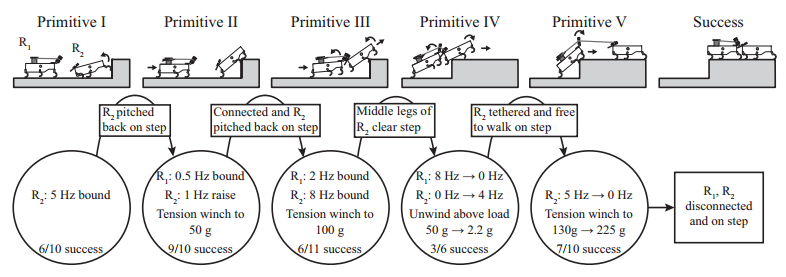
Om dit te bereiken hebben de onderzoekers naar eigen zeggen zogenaamde primitives ontwikkeld, die in verschillende stappen uiteenvallen. Per stap is er een verschillende kans van slagen, waarbij de laagste kans aanwezig is bij het omhoog duwen van een kakkerlak. Die kans bedraagt namelijk maar dertig procent. De andere handelingen kan de VelociRoach in minstens 60 procent van de gevallen met succes uitvoeren.
Volgens de onderzoekers komen dergelijke robots van pas in verschillende situaties, bijvoorbeeld bij het onderzoeken van ingestorte gebouwen en andere rampscenario's. De kleine machines zouden zich eenvoudig kunnen voortbewegen door nauwe doorgangen, die anders niet toegankelijk zijn. Bovendien zijn de machines eenvoudig en goedkoop te produceren, waardoor er ook wel eens een paar achtergelaten kunnen worden in een hoop puin. Tot nu toe waren minirobots over het algemeen goed in staat om bijvoorbeeld te rennen en te draaien, maar klimmen bleek een uitdaging te zijn.
![]() Helaas!
Helaas!
De video die je probeert te bekijken is niet langer beschikbaar op Tweakers.net.

/i/2000631834.png?f=fpa)
/i/1274010398.png?f=fpa)
/i/2000651907.png?f=fpa)
/i/2000586751.png?f=fpa)
:strip_exif()/i/1336040302.jpeg?f=fpa)
/i/1196845952.png?f=fpa)
:strip_exif()/i/1098602434.jpg?f=fpa)
/i/1233158120.png?f=fpa)
:strip_icc():strip_exif()/u/476334/pomf.jpg?f=community)
/u/439174/crop5d760b3a5c0ca_cropped.png?f=community)
/u/571892/crop570684bac70ce_cropped.png?f=community)
:strip_icc():strip_exif()/u/413154/crop58b70ac17873c_cropped.jpeg?f=community)
:strip_exif()/u/631810/crop56ed29daa383b_cropped.gif?f=community)
:strip_icc():strip_exif()/u/401873/images2.jpg?f=community)