De elektrische racewagens die mee gaan doen aan de Roborace worden voorzien van Nvidia's Drive PX 2-systeem. Met de hardware moeten de raceauto's autonoom op de racebaan voor een podiumplekje strijden. Snelheden zouden daarbij oplopen tot 300km/u.
Nvidia maakte tijdens de GPU Technology Conference bekend dat het zijn Drive PX 2-systeem voor autonoom rijden gaat leveren aan de Roborace. Dat kampioenschap werd vorig jaar al aangekondigd door de organisatoren van de Formule E.
De futuristisch ogende auto's die meedoen aan de Roborace worden gemaakt door Kinetik en zijn niet van een stoeltje voorzien. Er zit immers geen bestuurder in de auto; het gaat om een kampioenschap voor autonome racewagens.
/i/2001041341.jpeg?f=imagegallery)
De races zouden plaats moeten vinden voorafgaande aan de races van het Formule E-kampioenschap. Dat zou nog moeten gebeuren tijdens het seizoen 2016/2017, maar onbekend is wanneer de eerste Roborace verreden zal worden.
Nvidia werkt al lange tijd aan het Drive PX-systeem dat auto's zelf taken moet laten uitvoeren. Voor de huidige uitvoering gebruikt het bedrijf een Tegra X1-soc met Maxwell-gpu, maar het Drive PX 2-systeem krijgt nieuwere hardware met een gpu die is gebaseerd op de Pascal-architectuur. Op de CES-beurs in januari kondigde Nvidia het watergekoelde kastje al aan.
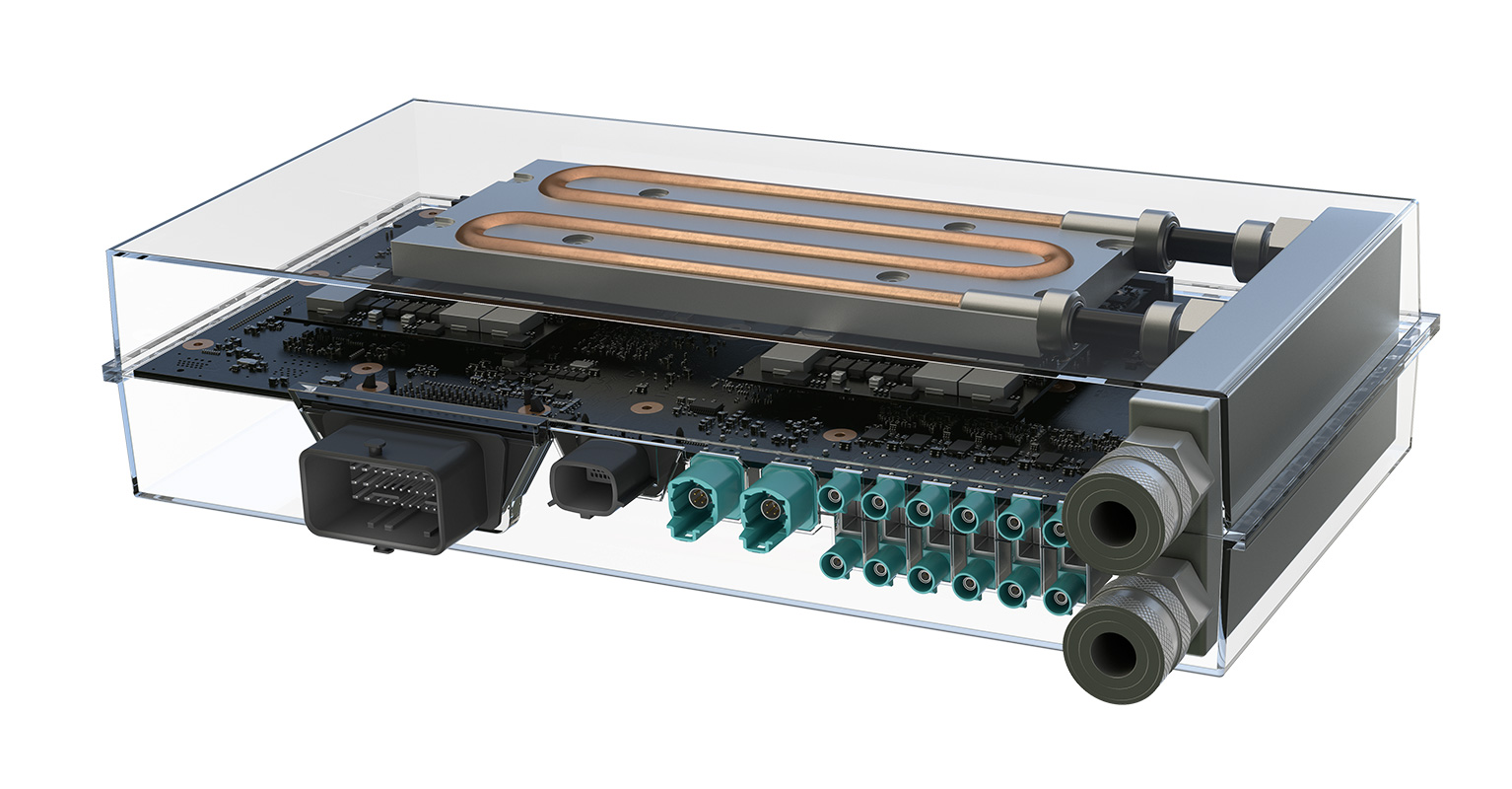 Nvidia Drive PX 2-hardware
Nvidia Drive PX 2-hardware

/i/2000820476.png?f=fpa)
/i/2001210767.png?f=fpa)
/i/1405520342.png?f=fpa)
/i/1335708372.png?f=fpa)
:strip_exif()/i/1212428440.gif?f=fpa)
:strip_icc():strip_exif()/u/1981/Image00001.jpg?f=community)
/u/39500/BoGy_4_Tweakers_60.png?f=community)
:strip_exif()/u/22713/liekevlecht2.gif?f=community)
/u/62384/crop61891f444d6e9.png?f=community)
:strip_icc():strip_exif()/u/44113/tux.jpg?f=community)
/u/12436/p1_normal.png?f=community)
:strip_icc():strip_exif()/u/262645/Waldorf.jpg?f=community)
:strip_icc():strip_exif()/u/57655/SuperTeamLogo.jpg?f=community)
:strip_icc():strip_exif()/u/50639/nun%2520icon.jpg?f=community)
/u/343341/crop6095457d39560_cropped.png?f=community)
:strip_icc():strip_exif()/u/29961/fokkoei.jpg?f=community)
:strip_exif()/u/148758/crop672e132f0ee41.gif?f=community)
:strip_exif()/u/583504/crop581ef90772953_cropped.gif?f=community)
:strip_exif()/u/7013/spunky_main.gif?f=community)
/u/296398/crop618d33cd3b82c_cropped.png?f=community)
{kind=link}
{kind=link}