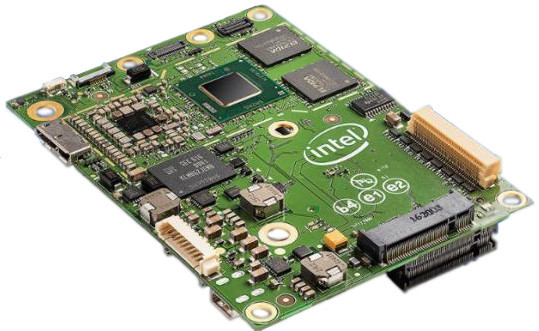
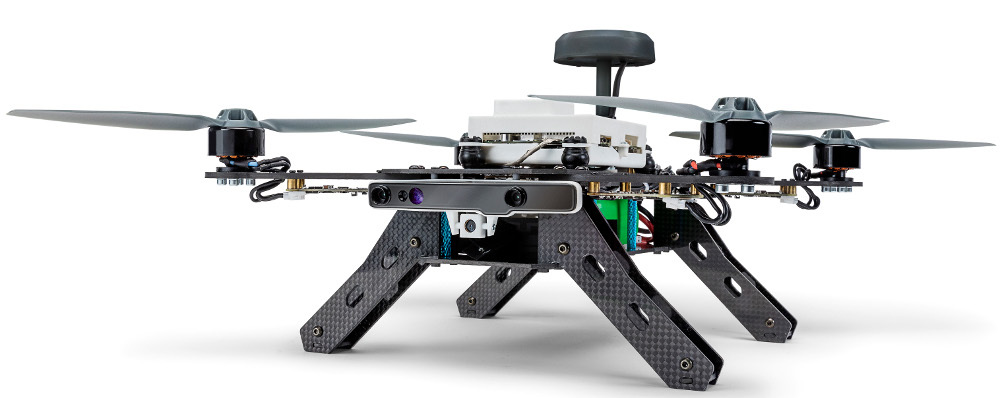
Intel heeft voor zijn Aero compute board en Aero ready to fly drone een nieuw board support package uitgebracht met 1.3.1 als versienummer. Het bordje beschikt over een Intel Atom x7-Z8750-quadcore, 4GB lpdrd3-1600-werkgeheugen en embedded 32GB emmc-opslaggeheugen. Hetzelfde bordje wordt gebruikt in de ready to fly-drone, waarbij je zelf dus niet meer hoeft te knutselen om aan de slag te gaan. De lijst met aanpassingen voor deze bsp-uitgave ziet er als volgt uit:
Intel Aero v1.3.1 releaseIntel Aero v1.3 release
- Fix issue with power button not working on RTF
Intel Aero v1.2 release
- Fix bug in mavlink-router startup script after update of ps utility: it's now possible again to stop mavlink-router
- Update mavlink-router:
- No longer spams stderr with warnings (some of them needed to be fixed and some are now aggregated and ratelimited)
- Detect PX4 and ArduPilot flight stacks automatically for logging
- Use meta-intel-aero with better compiler optimization options
- Update base Yocto Project version from 2.1.1 to 2.1.2, but keep kernel at same revision
- Start using os-release rather than custom OS release file
- Make aero-reboot-update correctly parse /etc/os-release on both current and update image
- New update procedure that does not require USB hub and monitor connected. Update is still done with a USB drive connected, but the update can be triggered by just connecting the board via WiFi or usb-ethernet. LEDs are used for monitoring the update.
- New packages added: RealSense ROS node, libavahi-client, efibootmgr, rng-tools
- tar, ps and top are no longer provided by busybox
- ssh daemon is now provided by OpenSSH, also providing sftp for easy file transfer
- Updated iwlwifi driver, wpa-supplicant and hostapd to help fix connection drops
- Wi-Fi Access Point starts 5 seconds faster and no longer requires the password several times
- Wi-Fi default network is now on 192.168.8.x to avoid conflicts with default IP ranges used by home routers
- mavlink-router updated providing:
- Configuration file with endpoints, being easier to change
- Default baudrate to talk to flight stack changed to 460800, which is the advised baudrate to avoid packet loss
- Flight stack logging for both PX4 and ArduPilot, which are now kept in /var/lib/mavlink-router/logs
- Bug fixes in general
- Updated binary for PX4: close to release 1.6 of PX4 upstream, providing:
- Improved flight stabilization with much better tunning (This needs a frame reset and complete sensor calibration with QGroundControl)
- Support to save waypoints
- Logging
- FPGA firmware changes:
- Version information
- Recovery FPGA firmware for RTF that allows instructing the flight controller to stop on bootloader
- All firmwares are now available on /etc/fpga
- Firmwares are built from open source repository at https://github.com/intel-aero/intel-aero-fpga
- The jam tool to flash FPGA firmware now accepts absolute paths
- All tools related to Aero board have now being renamed and prefixed with "aero-", which makes them easier to find. Symbolic links are kept to ensure backwards compatibility, but these are going to be removed in future. Anyone relying on them are advised to update their scripts
- Remove Linux console from ttyS1 as it conflicts with the flight stack during updates


:fill(white):strip_exif()/i/2001299157.jpeg?f=thumbmedium)
:strip_exif()/i/2001299159.png?f=thumbmedium)