Het Kickstarter-project Formula Pi heeft zich tot doel gesteld om door Raspberry Pi bestuurde voertuigjes van PiBorg tegen elkaar te laten racen. Deelnemers kunnen zelfgeschreven Python-code insturen en daarna hun robot via een livestream volgen.
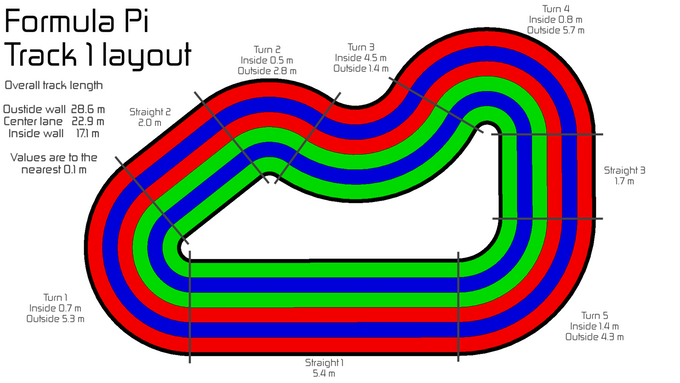
De races vinden plaats op een kleine baan met een lengte van 20m en met vijf bochten. De baan is ingedeeld in zes rijbanen in drie verschillende kleuren: groen, blauw en rood. Dit moet de met een camera uitgeruste voertuigen helpen om te navigeren. Er is een basispakket aan software beschikbaar, dat door deelnemers naar eigen inzicht aangepast kan worden om de robot zo goed mogelijk te laten presteren.

Alleen met een donatie van 35 pond, omgerekend ongeveer 41 euro, is deelname mogelijk, waarbij het niet uitmaakt waar de deelnemer zich in de wereld bevindt. De races vinden weliswaar plaats bij het Britse PiBorg, maar het is niet noodzakelijk om zelf fysiek aanwezig te zijn. De races zijn via een livestream te volgen en de software kan opgestuurd worden op een sd-kaartje. PiBorg zorgt dan voor de robot. Voor 165 pond, omgerekend bijna 200 euro, krijgt een donateur een eigen robot toegestuurd en mag hij ook deelnemen aan de races. Dan moet je er zelf nog wel een Raspberry Pi Zero, sd-kaart en camera bij regelen.
In de video van het Kickstarter-project is te zien dat de robots er meer uitzien als monstertrucks dan als formule 1-voertuigen. Ook is de snelheid niet oogverblindend. Het team achter Formula Pi kondigt echter aan in de toekomst ook andere voertuigtypes te willen ontwikkelen. Ook moeten er andere soorten races gehouden worden, zoals een high speed competition en een battle race competition. Het project heeft inmiddels binnen zes dagen zijn financieringsdoel van 2500 pond gehaald.
![]() Helaas!
Helaas!
De video die je probeert te bekijken is niet langer beschikbaar op Tweakers.net.

:fill(white):strip_exif()/i/2000868540.jpeg?f=thumbmedium)
/i/1212146675.png?f=fpa)
/i/2000658159.png?f=fpa)
/i/1325170337.png?f=fpa)
:strip_icc():strip_exif()/u/114619/crop5ddcf611cf8f9_cropped.jpeg?f=community)
:strip_icc():strip_exif()/u/145751/check-in-minion-small2.jpg?f=community)
:strip_icc():strip_exif()/u/61950/hakker.jpg?f=community)
:strip_exif()/u/244305/crop595f67ed70036_cropped.gif?f=community)
:strip_icc():strip_exif()/u/29/crop574c1e0dc27bd_cropped.jpeg?f=community)
:strip_exif()/u/255795/crop61eaa60539e4e_cropped.gif?f=community)
:strip_exif()/u/26289/ahxp68H.gif?f=community)
:strip_icc():strip_exif()/u/167500/crop58380e7ee40c7_cropped.jpeg?f=community)
:strip_icc():strip_exif()/u/176404/crop5d8a18233281d_cropped.jpeg?f=community)
:strip_exif()/u/677/crop5e62ccc026e5a_cropped.gif?f=community)
:strip_icc():strip_exif()/u/179920/Profile2.jpg?f=community)
:strip_icc():strip_exif()/u/41502/breezah.jpg?f=community)
:strip_icc():strip_exif()/u/90600/1005246_647191608633641_119027804_n%252060x60.jpg?f=community)
:strip_icc():strip_exif()/u/489983/crop5db33928bbeea_cropped.jpeg?f=community)
:strip_exif()/u/8178/hitchhikersguidethemoviesmall.gif?f=community)
/u/355158/crop575b478b97ccb.png?f=community)
:strip_exif()/u/63575/killbill_additionalproductimage_001_small.gif?f=community)
{kind=link}
{kind=link}