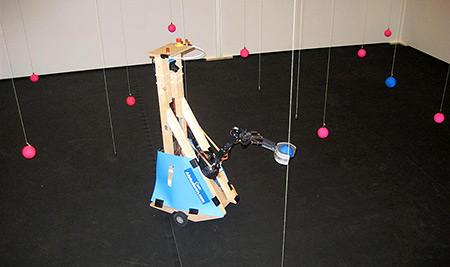
Afgelopen weekend werd in Leeuwarden de RoboChallenge 2007 gehouden. In deze wedstrijd nemen zelfgebouwde autonome robots het tegen elkaar op. Het doel is het zo snel mogelijk verzamelen van verschillende gekleurde ballen in een arena van vijf bij vijf meter. De wedstrijd wordt sinds 2003 jaarlijks georganiseerd en onder de deelnemers bevinden zich hogescholen, universiteiten, fanatieke hobbyisten en bedrijven. Ondergetekende was nauw betrokken bij deze wedstrijd. Afgelopen maanden heb ik meegeholpen met de begeleiding van de studenten van de RuG die samen met die van de Hanze meegedaan hebben aan de wedstrijd. Het RuG-team bestond uit tweedejaars informaticastudenten en was verantwoordelijk voor het schrijven van de software voor de robot. Het Hanze-team bestond uit werktuigbouwkunde-, elektrotechniek- en human technology-studenten en was verantwoordelijke voor de bouw van de robot.
In de wedstrijd nemen de robots het tegen elkaar op in drie verschillende missies waarbij in elke missie andere eisen zijn gesteld met betrekking tot het wel of niet mogen pakken van bepaalde kleuren ballen. Voor het pakken van de goede ballen worden punten toegekend die worden gebruikt om aan het eind een winnaar te bepalen. Hoewel het voor de mens niet moeilijk is om een paar gekleurde ballen op te pakken is het geen triviale opgave voor een autonome robot. De robot moet niet alleen in staat zijn om de ballen te herkennen, ook het snel en nauwkeurig navigeren naar de juiste bal en het ontwijken van obstakels is lastig.

Aan de wedstrijd deden diverse robots mee. De meeste robots maakten gebruik van een arm met grijper om de ballen te verzamelen, maar er waren ook andere oplossingen zoals een slurf met ventilatoren om de ballen naar binnen te zuigen. Afgelopen vrijdag werden kwalificatierondes gehouden om het kaf van het koren te scheiden. Acht robots wisten zich te plaatsen voor de wedstrijd van zaterdag. Al snel bleek dat de drie robots die ontwikkeld waren door de NHL het best presteerden. Deze robots waren grotendeels opgebouwd uit professionele standaard componenten waardoor het risico op problemen met de hardware minimaal was. Een goede tweede was de houten robot van Infosupport die bijzonder behendig balletjes wist te verzamelen. De robot van het RuG/Hanze-team wist helaas niet verder te komen dan de middenmoot.

Naast de RoboChallenge werd er ook een wedstrijd georganiseerd voor middelbare scholieren. Ook hier was het doel om een autonome robot te bouwen, maar in plaats van ballen moesten er blokjes verzameld worden. Om de navigatie te versimpelen was het speelveld voorzien van een rooster en waren de blokjes altijd op een kruispunt geplaatst. In de uiteindelijke missie was het de bedoeling om de gekleurde blokjes aan de andere kant van het veld te krijgen terwijl de tegenstander precies het tegenovergestelde probeerde. De meeste deelnemers maakten gebruik van Lego Mindstorms om de robot te bouwen, maar er waren ook enkele teams die de gehele robot van de grond af opgebouwd hadden.


/u/154116/zpestaartje%2520hq%2520rood%2520tweakers.png?f=community)
:strip_icc():strip_exif()/u/1740/shark.jpg?f=community)
:strip_icc():strip_exif()/u/32357/groen.jpg?f=community)
:strip_icc():strip_exif()/u/849/ricci1.jpg?f=community)
:strip_icc():strip_exif()/u/57655/SuperTeamLogo.jpg?f=community)
/u/86517/crop6930aecec11b7_cropped.png?f=community)
:strip_icc():strip_exif()/u/142797/crop5bb48830ad9bc.jpeg?f=community)
/u/98098/DSC03531.png?f=community)
:strip_icc():strip_exif()/u/163088/crop624c075895e1f_cropped.jpg?f=community)
/u/193515/crop6a685d05487b1_cropped.png?f=community)
/u/112490/crop5821eafeac2b9_cropped.png?f=community)
:strip_icc():strip_exif()/u/1103/crop5dcac670e78da_cropped.jpeg?f=community)
:strip_icc():strip_exif()/u/62681/oh_noes128.jpg?f=community)
{kind=link}
{kind=link}
{kind=link}
{kind=link}